- 01/03
- 2006
-
QQ扫一扫

-
Vision小助手
(CMVU)
对于运动物体的拍照的本质需要就是需要在一个很短的时间内判断运动物体的位置并完成瞬间图像的捕获,只有捕获了所需要的瞬间位置的清晰图像,才能有效的进行视觉检测。上面的所有名词所代表的方法都是为了完成响应外界触发信号进行快速拍照这个短暂的过程,一个短暂的过程却引入了如此多的名词,从某种意义说明了方法的多样性,也一定意义说明了这种测量手段的重要性。
高速的电子快门和可编程积分控制的作用都是让相机在很短的一个时间段内收集需要的光,避免光积分时间内物体运动过大造成图像模糊或拖影,它们所改变的是同样一个量,都是将在一个时间段光子在CCD成像区产生的电荷转移遮挡面的电荷存储区域。只不过前者以硬件跳线的形式提供给用户,用户只能够获得一些个别数值的曝光时间(比如1/60s,1/120s,1/1000s,up to 1/10000s,很多相机支持更短的快门时间,但常常不作为通用开关放在后面板而是放在CCD内部),后者则是把硬件曝光时间以软件接口的形式提供给了用户,这样做不是追求形式,它的更大意义在于快门时间可以在实际系统程序中能够在一个连续的范围内根据场景动态改变,而且更有利于高速应用场合。
逐行扫描和场模式都是为了避免普通隔行扫描相机对运动物体拍照时出现的奇偶错桢(又称梳形图comb)。普通标准视频制式(NTSC/PAL/CCIR/RS170)的模拟CCD相机(称为隔行或交织interlace相机)都是以桢模式扫描,每场都是相隔一行的像素被扫描出去。奇数场从第一行开始读出,偶数场从第二行开始读出,每场读出为1/60s, 奇偶场在垂直同步信号的帮助下形成全桢,适合于长时间积分或非运动物体的图像获取场合。由于同一桢中的两场图像不是在同一时间积分,捕获的高速运动物体图像必然会像百叶窗一样。为了避免这种情况人们设计了逐行扫描(非标准)以及场模式(可做标准输出),逐行扫描就像它名字所说的一行一行顺序进行扫描,场模式下总是相邻的两线被合并之后扫出,奇数数场与偶数场间有一线的偏移。场模式下的灵敏度是每场的扫描(1/60 s)的2倍,但垂直分辨率只有全桢模式的一半。用普通的隔行相机在要求不高的场合也可以做运动物体的检测,只需要在图像中只提取半桢进行处理。
频闪照明是运动采集中常见的手段,通常由频闪控制器控制闪光时间通常10ns ~ 100us,频闪LED通常有10ns以下的响应时间,因此与为了和曝光时间配合,让闪光最亮时能够采光,需要调整触发相机快门与频闪器之间的间隔时间,直到配合最佳。
触发后相机总会有个响应时间,这个时间对于高速运动的物体最好能够精确控制,普通的面阵相机(没有异步触发)总是等一帧扫描完,对于N制式的相机来说这个触发响应时间就会至少有0~33ms之间的不确定时间,如果采集卡寻找同步点的时间再长一点,这个不确定的时间长度又增加了,这段时间内物体有可能已经运动出了视场区域。为了加快相机的响应速度,就出现了异步复位功能,靠采集卡给相机施加外部时钟,如果是行异步方式,相机被触发后在下一个水平驱动脉冲(HD)立刻回起点进行扫描;如果是像素异步方式,CCD在触发后的下一个像素时钟就立刻从头扫描,这样可以更加迅速响应来获取触发瞬间的图像。
在实际应用过程,通常有以下几种比较常见的组合模式(注:以下所说的电子快门包含了可编程积分控制,异步触发,场模式或逐行扫描被认为是默认配置):
1、比较常用也是相对简单的方法就是不改变曝光速度(20ms/field,CCIR),当被测物体物体达到时,由传感装置触发频闪光源,闪光时间根据被测物体运动速度决定。一个短脉冲的频闪光有助于“凝固”图像,而且频闪光通常能够在短时间获得足够的亮度,对于相邻被测对像间隔时间长的测量/检测也可以达到节能增加光源寿命的作用。这种方法的最大局限就是要求没有环境光的干扰。
2、单单靠高速快门而不加频闪光是另一种比较常用的方法。高速快门一定要保证进入的光足够,通常需要用很高亮度的光源,高速的镜头(高NA),光圈调至最大,也可以增大相机的增益。用高速快门的一个很大优点就是能排除环境光的干扰。
3、上面的两种方法联合起来应用,不仅能在高速拍照过程中减少环境光的干扰,而且可以短时间获得足够的光能,更重要的是更适合于对运动物体进行高速采集的需要。有一点很重要也是不好操作的一点就是当快门时时间很短时,要让频闪先被触发,当光亮度最大时CCD开始积分,这个间隔时间通过硬件或软件的手段都可以进行调整。
第3种方案是一种比较有代表性的中/高速运动物体在线视觉测量的一种方案,整个系统的结构和原理如下图所示,我们在实际应用中采用了Costar的逐行扫描CCD相机SI-M310和Matrox meteor II/MC卡以及OSe的频闪发生器与LED光源。
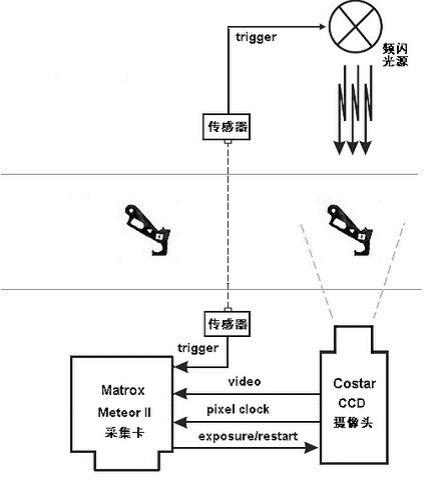
传送带上的物体运动到传感器(光电或磁等)的作用区域,会产生一个脉冲指示运动物体到达,这个脉冲一方面用来触发频闪发生器,让它带动LED闪光,另一方面触发采集卡的光偶输入端,它立刻产生一个触发信号来相机复位,接着会从相机接收 VSYNC (WEN) 和视频信号。这里触发频闪的脉冲来自传感器,实际相机和采集卡都有用来触发频闪的输出端,可以根据需要应用的方便进行连接。
触发过程有一点需要注意的是:在普通是触发模式下,当触发后当前桢开始曝光和传输,当这个过程没有完成时采集卡会忽略外部的触发脉冲,因此,要保证所有需要的(触发点)图像被捕获,就得保证两个触发脉冲间的间隔时间大于一桢图像完成曝光与传输的时间和。在异步触发模式下,如果脉冲间隔时间短于一桢图像完成曝光与传输的时间和,不同的相机可能会有不同的动作,一部分相机会同普通触发模式下相同,完成一桢的动作后才可以接收触发脉冲,而另一部分相机则会取消当前桢的动作,从新开始曝光,因此要获得所有需要的图像,同样应该保证触发脉冲间隔时间大于单桢图像完成曝光与传输的时间和。
小结
从上面三种组合方式我们很容易看出曝光时间和闪光时间的交集就是实际成像所利用的时间,具体方法的采用得考虑应用对象、环境以及成本要求等诸多因素。
附记
触发机制从原理上容易去描述,在实际的工业现场应用中它却常常被证明是引起问题的部分。这主要因为触发机制没有标准化,不同公司的相机和采集卡往往都拥有不同的硬件结构和电压定义,常常就同一种方法的称谓都是各说各话,很容易让人混淆这些概念。通过简单接线或模拟电路接收传感器的信号然后发送给采集卡、相机或频闪发生器的触发输入端,很容易有噪声信号产生,要获得稳定的视觉系统就必须有稳定干净的触发源。
- 上一条:机器视觉系统在烟草行业的应用
- 下一条:机器视觉在纺织检测中的应用