- 04/25
- 2007
-
QQ扫一扫

-
Vision小助手
(CMVU)
一、系统概述
在电气化铁路的运行过程中,需要不断检测供电电缆的宽度一致性,以确保在列车高速运行中不断电。另外,在隧道探伤、矿井检测等也需要高速监测仪器,以便快速、准确地检测目标。本系统即是此类需求的最佳选择方案。
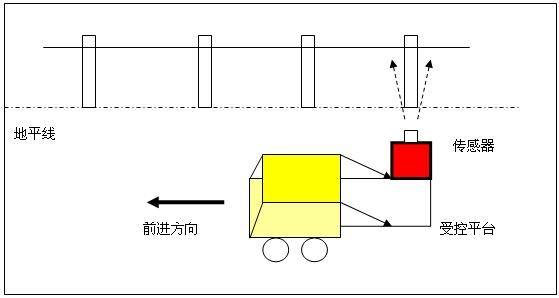
二、示意图
小车平台系统跟踪基准线,自动调平平台高度与基准线保持一致。
三、系统原理
整套系统建立在PC104Plus总线平台上,分为图像采集、目标识别、控制输出三大模块实现。
图像采集设备为微视图像PC104Plus总线图像采集卡Moka-M10(增加了MPEG-I压缩录像功能,支持视频流和音视频复合流两种压缩编码方式),变焦、聚焦、光圈软件可调的一体化摄像头及配套电源、支架等附属设备构成,主要承担图像采集、显示等任务,由摄像头拍摄图像,并将拍摄到的图像经视频线输出至采集卡、计算机;
模式识别软件将采集到的图像进行处理,自动提取出基准线,计算出基准线距给定的参考线的距离,根据距离输出不同的控制信号;
平台控制软件根据计算机给出的不同控制信号转换为不同的控制输出,送给伺服系统产生相应的响应;
四、系统构成
1、硬件
整个图像采集、处理、识别系统大致由PC104Plus总线主板、微视图像Moka-M10图像采集卡、Honeywell一体化摄像头、模式识别软件及辅助设备组成。
2、软件
● 定标控制系统
每次试验前,采用手工标定的方法,采集一幅标准位置的图像。考虑到调整的方便,最好调整平台的位置,使得参考基准线的位置位于图像上下方向的中央位置。将此位置下的平台位置坐标、参考基准线的位置坐标纪录下来,作为后面测量、调整、校正的基准及参考零点。
● 图像采集、模式识别系统
本系统提供图像采集、图像分割、目标提取、细化、模式识别等一系列采集、处理、分析功能,根据参考零点最终给出目标距离参考位置的偏差程度以及需要调整的物理量。
● 平台状态调整系统
本系统根据模式识别的结果及给出的需要调整的物理量,调解平台的位置姿态,最终使得模式识别的结果达到偏差的误差要求。
- 上一条:烟盒包装高速自动检测系统
- 下一条:微视图像非接触式位移测量系统