- 06/11
- 2008
-
QQ扫一扫

-
Vision小助手
(CMVU)
富士重工业在“人与车科技展2008”(2008年5月21~23日)上,展示了配备驾驶支援系统“EyeSight”的“力狮”及其摄像头单元、图像处理LSI。“EyeSight”系统采用立体摄像头实现预防碰撞和0~100km/h的巡航控制。
EyeSight使用立体摄像机而非毫米波雷达或激光雷达来测量与前方车辆及行人间的距离。当有与车辆前方的障害物相撞的危险时,会通过警报、警告灯及警告制动提醒驾驶员注意,之后自动实施制动。虽然在碰撞前1.4秒实施制动,从技术上来说也能做到避免碰撞,但“为避免导致驾驶员过分依赖系统,所以本系统(宣传时)只能“做到”减轻由碰撞导致的伤害程度”(解说员)。
此次展示的摄像单元由日立制作所制造,在铝合金制造的机身上配备了ECU(电子控制单元)和两个30万像素的黑白CCD。在ECU上配备了同为日立制作所制造的图像处理ASIC以及其他多个微处理器。图像处理IC由原来能够编程但价格较高的FPGA改成了ASIC,削减了芯片成本,并提高了处理性能。该IC能够通过识别图像的各像素来判断车辆与对象物间的距离,瞬间将信息发送至控制电路。控制电路将移动速度与本车车速相同的物体判断为周围环境,将其它障害物识别为前方车辆及行人等。
在系统中,摄像单元与发动机的ECU以及刹车助力器的ECU联动,经由传输速度为500kbps的CAN从摄像头单元向各ECU发出加减速指令。减速时通过减小发动机输出功率、启动制动助力器来降低车速。另外,车速等车辆信息由发动机ECU和防侧滑装置收集,对驾驶员显示的信息将输出到仪表板上。
要实现量产最费功夫的是,为使立体摄像机用左右两侧拍摄图像的差来检测距离,配备在汽车上如何保持精度。为此,制造时需要就单元水平及车辆运行时两方面调整摄像头的动作状态,并且加入在摄像头工作时进行自动调整的功能。
解决以上难题的具体做法是:首先,以铝压铸制造单元以确保刚性,并在出厂前确认CCD是否正确安装并进行调整。之后,在车辆生产线上安装时,先将单元安装到车身并盖上保护罩,然后调节摄像头的角度。使用时还可自动调整,通过恰当地判断图像,以正确的角度识别图像。三次调整中,除首次之外,后两次都是通过从CCD的摄像范围中选择实际输出范围进行调整的。

图2:“力狮”上配备的立体摄像头
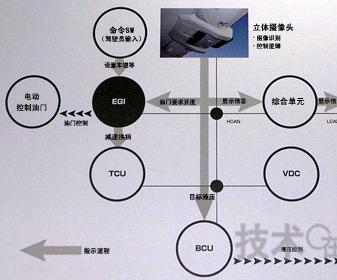
图3:系统构成
(中国图像网报道)
摘自:日经BP社
- 上一条:EMVA成为AUTOMATICA合作伙伴
- 下一条:弥补技术差距