- 02/11
- 2020
-
QQ扫一扫

-
Vision小助手
(CMVU)
摘 要:对CCD拍到的图像先进行直方图均衡,再用模板匹配法对轨道基桩进行识别;结果表明,在对图像进行合适的预处理后提取有代表性的样本进行匹配,能将所拍图像中的轨道基桩有效地识别出来,且达到较高的正确率。
关键词:模板匹配;直方图均衡;图像识别
在铁路建设中,经实地测量后在铺设线路打下建设基桩,然后以基桩为参照进行铁轨铺设。铁路建设完成后,要以基桩为两轨中心进行验收,一般要求基桩与两轨中心的偏移量为毫米级。由于使用中基桩数量比较多,而目前我国所用的检测方法都是人工的,所以比较费力费时,精度也不高。本文用CCD器件,通过机器视觉的方法进行检测。此方案的关键是要将CCD器件所拍图像中的基桩识别出来。现在用于图像识别的方法很多,但是大多都是对特定的问题效果较好,没有统一的办法。本文运用模板匹配求最大相关度的方法,在对图像进行直方图均衡处理后,进行样本的提取与匹配。
1.最大相关的模板匹配
1.1 模板匹配的原理
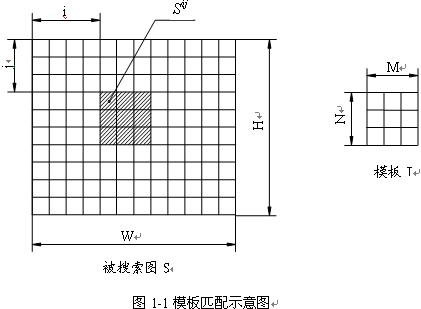
模板匹配的基本原理是利用已知的样本模板与待匹配图像进行对比;从待匹配图像的左上角点开始,用样本模板和待匹配图像中同样大小的一块区域去对比,求出其相关系数,然后平移到下一个像素,重复进行同样的操作,直到样本模板对比完所有的区域,相关系数最大的那块区域就是要找物体图像所在的区域。
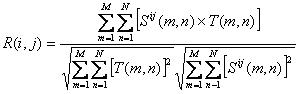
1.2 模板匹配的算法
在图1-1中,设模板T为一个M×N的图像,被搜索图S为一个W×H图像(M![]() 的内容,可以用(1-1)式来衡量T和Sij的相似程度:<W,N<H),模板T叠放在S上平移,模板下覆盖的那块被搜索图叫做子图; 的内容,可以用(1-1)式来衡量T和Sij的相似程度:
的内容,可以用(1-1)式来衡量T和Sij的相似程度:<W,N<H),模板T叠放在S上平移,模板下覆盖的那块被搜索图叫做子图; 的内容,可以用(1-1)式来衡量T和Sij的相似程度:
![]() (1-1)
(1-1)![]() (1-2)
(1-2)
当 ![]() 中的值 由1变到W-M+1,而 由1变到H-N+1时,模板就在整个图像上做完了一次相关计算。公式(1-2)右边的第三项表示模板的总能量,是一个常数。第一项是模板覆盖下的子图能量,随
中的值 由1变到W-M+1,而 由1变到H-N+1时,模板就在整个图像上做完了一次相关计算。公式(1-2)右边的第三项表示模板的总能量,是一个常数。第一项是模板覆盖下的子图能量,随![]() 位置而缓慢改变。第二项是子图和模板的互相关,随着
位置而缓慢改变。第二项是子图和模板的互相关,随着![]() 改变。当模板和子图匹配时D(i,j)值最大。因此可以用以下相关函数做相似性测度:
改变。当模板和子图匹配时D(i,j)值最大。因此可以用以下相关函数做相似性测度:
 (1-3)
(1-3)
根据柯西-施瓦兹不等式可知公式(1-3)中![]() ,并且仅在
,并且仅在![]() 为常数时,
为常数时,![]() 取最大值1。
取最大值1。
2.直方图均衡处理的图像匹配
2.1直方图均衡
直方图均衡也称为灰度均衡,是一种灰度增强的方法;目的是通过点运算使输入图像转换为在每一灰度级上都有相同的像素点数的输出图像。经过均衡化处理的图像,其所有灰度级出现的概率相同;此时,图像的熵最大,图像的信息量最大。这种方法在进行匹配前将图像转换为一致的格式,对图像匹配的正确性非常有好处。
直方图均衡化处理是以累积分布函数变换法为基础的直方图修正法。假定变换函数为:
s=T(r)= ![]() (1-4)
(1-4)
式中![]() 就是r的累积分布函数(CDF)。
就是r的累积分布函数(CDF)。
对式(1-4)中的r求导,得:
![]() (1-5)
(1-5)
则由概率论知识,变换后的概率密度 ![]() 与变换前的概率密度
与变换前的概率密度![]() 的关系为:
的关系为:
![]()
![]() (1-6)
(1-6)
由以上推导可见,变换后的变量s在定义域内的概率密度是均匀分布的。用r的累积分布函数作为变换函数可以生成灰度级分布具有均匀概率密度的图像。其结果扩展了像素取值的动态范围。
对离散图像,直方图均衡的转换公式为:
![]()
其中,![]() 为输出图像的灰度,
为输出图像的灰度, ![]() 为输入图像的灰度,
为输入图像的灰度,![]() 为第i级灰度的像素个数,
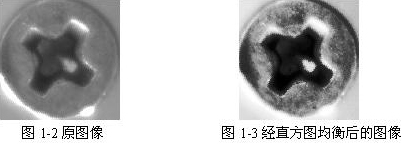
为第i级灰度的像素个数, ![]() 为图像的最大灰度值(对灰度图为255)。图1-2、图1-3为经直方图均衡前后的两张样本模板图像。
为图像的最大灰度值(对灰度图为255)。图1-2、图1-3为经直方图均衡前后的两张样本模板图像。
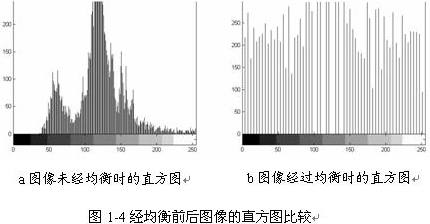
用MATLAB得它们的灰度直方图分别如下图1-4中a、b所示:
从直方图上可以看出,经灰度均衡后的图像,其灰度值的动态范围大大地扩展了,图像数据在分布范围上有明显的改善。
2.2样本模板的选择
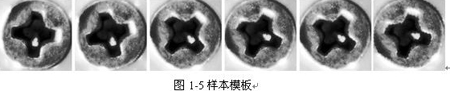
对用CCD器件拍到的图片进除噪、平滑等预处理后,将基桩部分剪切出来,缩放成30×3O像素的图像,再进行直方图均衡处理,作为匹配样本;由于用模板匹配进行图像识别时图像旋转对识别结果有较大的影响,所以按同样的方法,将模板图像连续进行10度的旋转,共计取10张样本(部分样本模板图像如下图1-5)。
2.3图像的匹配
由于模板匹配法中模板要在除模板区域大小的所有参考位置上进行相关计算,其中除一点外都是在非匹配点上做无用功,所以图像的大小对运算的时间有较大的影响。为了改善这一缺点,缩短运算时间,对拍回的图像进行了缩小处理。具体匹配过程为:
(1) 用CCD将图像采回;
(2) 进行除噪、平滑等预处理;
(3) 将图像缩小为原来的0.25倍;
(4) 进行直方图均衡;
(5) 用10幅样本进行匹配,比较每次匹配的最大相关系数,相关系数最大时模板的位置即为目标图像所在的位置。
本文采用VC++编制的程序进行图像匹配。在找到目标区域后,记下目标区域左上角的坐标值,然后用与缩小时相对应的关系,将图像的坐标值映射回原图像上,再将找到的目标区域按相对应的关系放大回原图像上,此时原图上所映射的区域即为最终要找的目标图像区域。
3.结果分析
在实验中,对随机拍摄的49幅基桩图像进行识别,经直方图均衡化处理后识别到48张,识别率达到97%以上;而未经均衡处理时识别到35张,识别率为71%。且每幅图像的识别时间均在1秒以下,满足了适时性的要求。
4.结束语
实验结果表明,经直方图均衡化处理后模板匹配的识别率有了较大的提高。对图像在匹配前进行缩小,有效地加快了匹配的速度,缩短了识别时间。如果还要加快运算速度,可以采用SSDA(序贯相似性检测)的算法。但是用模板匹配法识别时,目标的中心点会发生偏移,不能对目标中心进行准确定位。要想提高定位的精度,需要对识别到的目标进行边缘检测,利用基桩的圆边进行中心的确定。
参考文献:
[1]何斌,马天予,王运坚,朱红莲,Visual C++数字图像处理,人民邮电出版社,2001.4
[2]阮秋琦,数字图像处理,电子工业出版社,2001.1
[3]章毓晋,图象工程,清华大学出版社,2000.8
[4]张铮,杨文平,石博强等,MATLAB程序设计与实例应用,中国铁道出版社,2003.11
- 上一条:H.264/AVC快速帧内预测模式选择算法
- 下一条:视频监控系统的运动检测及报警