- 03/11
- 2020
-
QQ扫一扫

-
Vision小助手
(CMVU)
摘要:在分析传统Otsu算法局限性的基础上,结合形态学闭运算的特点,提出了基于Otsu局部递归和闭运算相结合的算法。算法原理为先将原始图像经过一次Otsu分割,对目标区域进行闭运算,由于剩余的背景图象中仍含有部分目标区域,于是将背景图像作为新的图像进行下一次Otsu分割,如此递归下去,将每一次闭运算后得到的目标图像按一定的权值进行累加,得到目标结果图像。该算法有效地解决了由于目标车辆局部灰度与背景灰度相近而导致的单个目标被分割的现象,恰当的选取闭运算模版可有效防止多个目标粘连的问题。试验结果表明,该算法能稳定地实现目标的提取,具有较好的鲁棒性。
关键词:图像分割;Otsu算法;局部递归;闭运算
在图像分割中,Otsu阈值化是一种广泛使用的工具,它是一种自动的非参数无监督的阈值选择法。该方法计算简单,仅需计算灰度直方图的零阶和一阶累积矩,经Sahoo等人通过试验证明,Otsu法是一种很好的阈值化方法。但是,对于某些情况,用Otsu准则得到的门限与理想门限之间也会存在较大的差异,特别是当目标区域的面积与背景区域的面积相差悬殊时[3]。简单的一次Otsu分割会错误地将部分目标划分到背景区域,特别是对于多目标检测,使检测到的目标数量与实际不符。针对此问题,本文提出了一种基于Otsu局部递归和闭运算相结合的多目标监测算法。
1. 算法原理
1.1 Otsu阈值化方法原理
Otsu阈值方法[2]是在判决分析最小二乘法原理的基础上的最佳阈值法。假设原始图像灰度级为L,灰度为i的像素的个数为ni,图像的总像素数为N,则可以得到个灰度出现的概率Pi :
![]()
在图像分割中,按照灰度级用阈值t将灰度划分为两类 :C0=(0,1,……t)和C1=(t+1,t+2,……L-1)。因此C0和C1出现的概率w0和w1为:
![]()
因此C0和C1出现的平均灰度u0和u1为:
其中![]()
C0和C1类的方差可由下式得到

定义类内方差
![]()
定义类间方差
![]()
定义总体方差
![]()
引进简单的判决准则
![]()
该准则将使两类得到最佳分离的t*值作为最佳阈值。因此将 ![]() 定为最大判定准则。
定为最大判定准则。
![]()
1.2 闭运算算法原理
1.2.1 膨胀
膨胀是将与某物体接触的所有背景点合并到该物体中的过程。过程的结果是使物体的面积增大了相应数量的点。如果两个物体在某一点相隔少于三个象素,它们将在该点连通起来,合并成一个物体。它在填补分割后物体中的空洞时很有用。它的定义为[4]:
![]()
其中,B为二值图像,S为结构元素。
1.2.2 腐蚀
腐蚀是消除物体所有边界,使剩下的物体沿其周边比原物体小一个象素的过程。腐蚀过后,在任何方向的宽度不大于两个象素的物体将被除去。它能从一幅图像中去除小且无意义的物体。一般腐蚀定义为:
![]()
1.2.3 闭运算
闭运算是先膨胀后腐蚀的过程,它具有填充物体内细小空洞、连接临近物体、在不明显改变物体面积的情况下平滑其边界的作用。其定义为:
![]()
1.3 Otsu局部递归和闭运算相结合算法
远距离的运动车辆实时监控中,常常同时有几辆运动车辆同时进入视野中,而且运动车辆在图像中占有的目标区域面积与背景面积相差悬殊,简单的一次Otsu分割会错误地将部分目标划分到背景区域[1]、或对进入视野的目标车辆数目进行错误的统计。为解决以上问题,提出了Otsu局部递归和闭运算相结合的算法。
一次Otsu分割的结果图像可以分为两部分,像素级较高的背景区域和像素级相对较低的目标区域。由于汽车目标局部(特别是挡风玻璃)的灰度级十分接近背景的灰度级,一次分割后被错误的划分到背景区域,于是一次Otsu分割后对二值图像进行闭运算处理,用以连接同一车辆目标的不同部分。由于背景区域中含有部分目标,先将目标区域放在一边,将背景区域提取出来作为结果图像,接着对得到的结果图像进行新一轮的Otsu分割和闭运算处理。具体步骤如下:
将原始图像的所有像素看成点集B,对它进行Otsu分割,得到的阈值t将其分为目标区域B1和背景区域O1两个点集,其中B1的灰度级较低,O1的灰度级较高。
![]()
接着用3×3的模版S对得到的目标区域B1进行闭运算处理,得到新的目标区域![]() ,即:
,即:
![]()
用原始图像除去![]() 就得到闭运算后的背景图像
就得到闭运算后的背景图像![]() 。由于
。由于![]() 中含有部分目标区域,于是对
中含有部分目标区域,于是对![]() 进行Otsu分割,得到一个比t大的阈值t1将
进行Otsu分割,得到一个比t大的阈值t1将![]() 分割为B2和O2两个点集。其中B2的灰度级较低,O2的灰度级较高。
分割为B2和O2两个点集。其中B2的灰度级较低,O2的灰度级较高。
![]()
同上,用3×3的模版S对得到的目标区域B2进行闭运算处理,得到新的目标区域![]() ,即:
,即:
![]()
用 ![]() 除去
除去![]() 就得到背景图像
就得到背景图像![]() ,接着对
,接着对![]() 进行Otsu分割。按照以上方法依次递归下去,设n次后停止递归,得到目标区域点集
进行Otsu分割。按照以上方法依次递归下去,设n次后停止递归,得到目标区域点集![]() 和背景区域点集
和背景区域点集![]()
最后,对由递归得到的目标区域点![]() 、
、![]() ……
…… ![]() 进行累加,记为A。
进行累加,记为A。
![]()
其中, ![]() ,
,![]() …
… ![]() 是目标区域的权值,A是所求的多个目标监测的结果。
是目标区域的权值,A是所求的多个目标监测的结果。
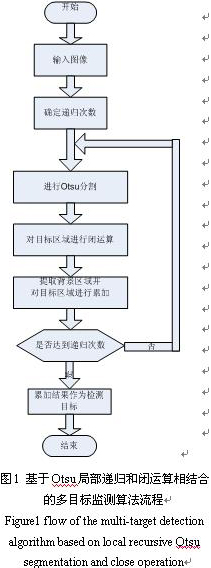
由于采用规定递归次数作为停止判别条件,对于不同的图像,n次分割后不一定会达到最佳效果。试验中,针对不同的背景、目标与背景所占像素的比例关系确定最佳的递归次数。整个基于Otsu局部递归和闭运算相结合的目标提取算法流程如图1所示。
2 实验结果分析
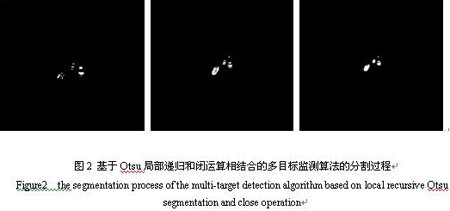
实验中采用380×360的图像,目的是提取运动中的四辆车,像素值从20到200不等。如图2(a)-(c)所示为由Otsu局部递归和闭运算相结合算法的分割过程。(a)所示为经过一次Otsu局部递归和闭运算相结合算法后的分割结果,可以看出,单个目标物体被分割为几部分,从而导致目标区域分割的失败。(b)所示为经过6次分割后的结果,目标物体的分割状况已大为改善,(c)所示为分割结果,得到了完整且相互独立的四个目标区域。
3 结束语
本文通过将Otsu局部递归算法与形态
学闭运算结合起来,对得到的n个目标区域进行累加,有效的避免了目标区域的误计数,较容易地将多个目标从背景中提取出来。
参考文献:
[1] 汪国有,邹玉兰,凌勇.基于显著性的OTSU局部递归分割算法.华中科技大学学报(自然科学版).2002,30(9):57~59。
[2] 魏阳杰,董再励等.新的Otsu阈值改进方法的红外小目标检测.光电工程.2004,31(11):23~26。
[3] Ursula Gonzales-Barron, Francis Butler. A
comparison of seven thresholding techniques with the k-means clustering algorithm for measurement of bread-crumb features by digital image analysis. Journal of Food Engineering 74(2006) 268~278.
[4] Kenneth R.Castleman 等,朱志刚等译.《数字图像处理》.电子工业出版社,2002:396~397
- 上一条:Turbo码及其交织硬件实现
- 下一条:三维地震数据场直接体绘制方法与应用