- 01/22
- 2006
-
QQ扫一扫

-
Vision小助手
(CMVU)
凌华图像运动控制卡基于PC的目标追踪系统的应用
ADLINK—凌华科技集团
[系统概述]该系统采用凌华公司的基于PC机的图像捕捉卡(Picolo)以及运动控制卡(PCI-8164)来完成目标的捕捉及追踪转台的运动控制。选用标准视频输入的黑白摄像机,每秒可以拍摄25张照片,可以实现实时图像采集。用凌华公司提供的用于图像分析的二次软件开发包,可以很轻松的对拍摄的图像进行分析,找出所关心的目标并计算目标的位置。采用微分控制方式通过运动控制卡发出指令,实时跟踪目标
[关键词] 运动控制,图像采集,机器视觉,目标追踪,CCD摄像机,伺服电机
一、系统构成与原理
1.1机器视觉
所谓机器视觉就是:赋予机器以人类视觉功能,突破人类自身视觉的局限性,把计算机的快速性、可靠性、结果的可重复性,与人类视觉的高度智能化和抽象能力相结合,由此逐渐形成了一门新学科。机器视觉系统采用CCD照相机将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,如:面积、长度、数量、位置等;根据预设的容许度和其他条件输出分析结果。机器视觉系统一般由光源,镜头,CCD照相机,图像处理单元(或图像捕获卡),图像处理软件,监视器,通讯/输入输出单元等部分组成。(见图 1)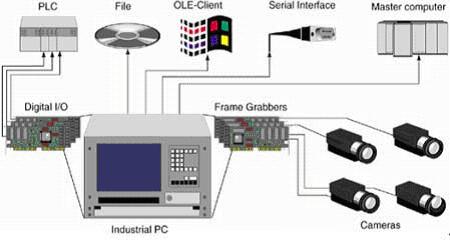
图片1
1.2伺服电机
伺服电机把输入的控制电压信号变为输出的角位移或角速度,它的运动状态由控制信号控制,加上控制电压,他应当马上旋转,去掉控制电压它应马上停转,转速高低应用控制电压成正比。相对于同样应用于运动控制的的步进电机它有如下优点:
1.控制精度更高:伺服电机的控制精度由电机轴后端的旋转编码器保证,对于17位的旋转编码器而言,驱动器每接收217=131072个脉冲电机旋转一圈,其脉冲当量为360°/131072=0.0027
2.伺服电机运转非常平稳,即使在低速时也不会出现振动现象
3.伺服电机为恒力矩输出,即在其额定转速(一般为2000RPM或3000RPM)以内,都能输出额定转矩,在额定转速以上为恒功率输出。
4.交流伺服电机具有较强的过载能力 。一般是额定转矩的2-3倍。
5.伺服系统的加速性能较好从静止加速到其额定转速3000RPM仅需几毫秒,可用于要求快速启停的控制场合。
6.伺服驱动系统为闭环控制,驱动器可直接对电机编码器反馈信号进行采样,内部构成位置环和速度环,一般不会出现步进电机的丢步或过冲的现象,控制性能更为可靠。(如图 2)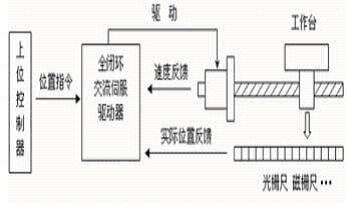
图片2
1.3 基于PC的运动控制系统
为了满足新型数控系统的标准化、柔性、开放性等要求;在各种工业设备(如包装机械、印刷机械等)、国防装备(如跟踪定位系统等)、智能医疗装置等设备的自动化控制系统研制和改造中,急需一个运动控制模块的硬件平台;同时PC机在各种工业现场的广泛应用,也促使配备相应的控制卡以充分发挥PC机的强大功能。基于PC的运动控制系统的构成如图3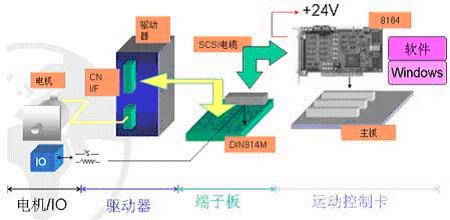
图片3
上图所示是目标追踪系统的控制单元部分的结构图。选用凌华公司的运动控制卡(PCI-8164)、三菱公司的伺服电机及驱动器、和专为配合三菱伺服电机而设计的端子板(DIN-814M)。由于有相配合的端子板,整个控制部分的接线非常简单。
1.4运动控制卡:PCI-8164
1. 支持OUT/DIR和CW/CCW脉冲输出方式,最大脉冲输出频率:6.55Mpps
2. 可同时控制四轴电机,任意两轴、三轴的直线插补,任意两轴的圆弧插补
3. 支持持续插补运动
4. 梯形与S曲线速度曲线
5. 可编程控制加速与减速时间
6. 可以在运动中改变速度
7. 多轴同步启动/停止
8. 位置比较与捕捉位置功能
9. 回差补偿功能
1.5图像捕捉卡:Picolo
1. 可接1个摄像头
2. 三种模拟视频信号输入方式
3. 支持PAL / NTSC / CCIR / RS170制式
4. 一个S-Video视频输入
5. 实时视频捕捉(PCI总线主控DMA方式)
6. 四个数字量输入/输出通道
1.6图像分析软件包:Evision_EasyMatch
EasyMatch是颜色和灰度级别的模式匹配库。它可以让系统在图像中找到与基准模式相匹配的部分,并计算出目标的位置。即使目标发生旋转,等放性或任意方向的缩放,它都可以找到目标。(如图 4)
图片4
二、结束语
该系统已在标准工控机上得到验证,同时可扩展到嵌入式结构中。可应用于汽车、船舶、飞机等对尺寸有严格要求的场合。
- 上一条:基于CAN总线的多视觉传感器测控系统的设计
- 下一条:智能相机在机器视觉中的应用