- 01/30
- 2006
-
QQ扫一扫

-
Vision小助手
(CMVU)
医用透视图像数字化处理与控制系统
吴丽娟1, 丁言镁 2
(1.沈阳师范大学物理科学与技术学院 沈阳110034)
(2.沈阳师范大学实验中心 沈阳110034)
摘要:本文介绍了医用透视图像数字化处理与控制系统的总体结构。对人机交互界面、硬件子系统和软件子系统的组成及各部分功能进行了说明,通过理论分析与实验结果验证了实时监控技术的实现过程,给出了算法的流程图。介绍了数据库的实现和功能,并对系统的运行结果进行了分析。
关键词: 医用透视图像; 实时监控; 图像处理; 数据库
Abstract: Whole structure of digital processing and control system of medical perspective image was introduced in the paper. Comprising and function of human-computer interaction, hardware system and software system were illuminated. The realizations of real–time supervise and control was verified by theory analyzing and preliminary experimentation results. The algorithm chart was give, and he running results of the system was analyzed.
Key words: Medical perspective image;Real–time supervise and control ;Image processing; Database
1 前言
数字图像是当今人们多姿多彩的生活不可或缺的一部分,随着多媒体计算机技术的发展,数字图像处理技术得到了长足的发展。特别是在医疗诊断方面的应用前景越来越广阔。今天的医学影像设备,可以说是以计算机为基础数字化设备。由于数字化成像速度快,缩短影像诊断时间,既方便患者,又为远程诊断等先进技术的应用提供了技术支持。一方面,计算机可对图像进行多种方式的处理,如去噪、增加对比度、提取图像边缘等,给医生客观、准确地诊断病情提供有利的依据。另一方面,患者在接受诊断和治疗的同时受到一定X线剂量的辐照,而长时间的剂量积累会引发出其它病变,所以,最大限度地减少辐照剂量是医用X线的发展方向。针对上述两个方面我们着手设计了医用透视图像数字化处理与控制系统,最终以达到降低医用图像噪声、提高影像对比度和清晰度、减少辐照剂量的目的。
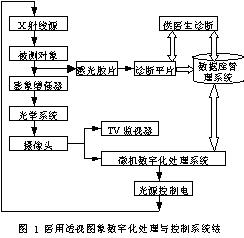
医用透视图像数字化处理与控制系统(以下简称医用图像系统)由硬件系统、软件系统、控制系统、数据库系统四大部分组成,系统总体结构图如图1所示。
2 系统结构
2.1 硬件系统的工作原理
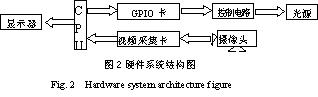
硬件系统包括六部分:摄像头、视频采集卡、GPIO卡、PC机、控制电路、光源,系统结构如图2所示。
硬件系统的工作原理:计算机启动GPIO卡输出一个高电平,使控制电路导通来驱动光源发光,此光源充当被摄物体的背景光源,同时计算机启动视频采集卡,开始采集由摄像头摄入的被照物体图像,把图像采集到显示器上,为了减少对患者的辐照剂量,尽量缩短检查时的辐照时间,本系统采用脉冲式间隔控制辐照光源,由软件实现自动控制,即定时采集多幅图像后,计算机控制GPIO卡输出一个低电平以关闭光源,同时图像采集卡停止工作,如此循环。
2.2 软件系统的工作原理
1 软件系统的结构
软件系统包括四个功能模块:人机交互界面、图像采集、图像处理、信息控制。其系统结构如图3所示。在Windows环境下采用Visual C++ 6.0编程来实现。

(1) 人机交互界面
人机交互界面包括显示图像窗体、显示控制脉冲、功能按钮设置、菜单设置四个部分。
(2) 图像采集模块
图像采集有连续采集和单次采集两种工作模式:
连续采集:是指经摄像头、视频采集卡把景物直接采集到显示窗体,得到的是连续的AVI文件。
单次采集:是在连续采集的AVI文件上进行“抓图”,即采集一幅32位真彩色BMP位图文件。
(3) 图像处理模块
图像处理包括图像存储、叠加去噪、2D处理三个部分。
图像存储:保存“抓图”的多幅BMP文件和叠加去噪后的BMP文件及2D处理后的BMP文件。
叠加去噪:把单次采集的多幅图像进行叠加平均去噪,以降低原图像噪声,可选择叠加图像幅数。
2D处理:对叠加去噪后的图像或对磁盘输入的图像文件进行2D处理,包括图像增强、图像分割等处理。
(4) 信息控制模块
信息控制包括采集时间控制、采集频率控制。
采集时间控制:控制脉冲高电平时间。
采集频率控制:控制脉冲频率。
3 实时控制技术的实现
实时控制系统是医用图像系统的重要部分,它是用来控制X光源采用脉冲式发射,从而达到降低X光辐照量。
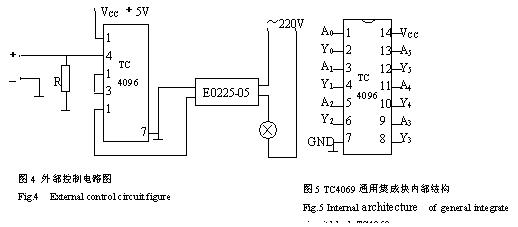
控制系统工作原理:医用图像系统设置GPIO卡的TTL第二路作为输出,输出高电平为+5V,输出低电平为0V。高电平的时间为X光源照射时间,低电平的时间为无X光源照射时间,在GPIO卡的输出端接有一个外部控制电路。当GPIO卡输出+5V高电平时,信号经非门两极反向后驱动能力大大增强,然后加到固态继电器的输入端,固态继电器SSR导通,接通外部电路,光源发光。当GPIO卡输出低电平时,输出端没有信号,SSR断开,断开外部电路,光源熄灭。电路原理图如图4、5所示。
设置高电平的时间(秒)为:![]()
设置低电平的时间(秒)为:
![]()
这两个公式是根据本系统的源程序运行时间计算得到,各个参数视具体情况而定,又因为发光体对人眼的视觉暂留时间约为0.1秒,所以要确保 ,其中:m为抓图幅数;其中:
f:抓图频率;
t:计算机执行一条程序语句的时间;
biHeight:图像行数;
biWidth:图像宽度;
1,6,75是指源程序中的语句 数(很多语句都是调用函数的语句);
T:延迟时间。
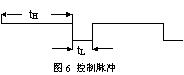
实时监控技术可设置监控时间、抓图频率、抓图幅数、延迟时间等监控参数,如图7所示。

实时控制系统包括抓图、多幅图像叠加平均、光源控制3个主要功能模块,实时控制系统实现的流程如图8所示。
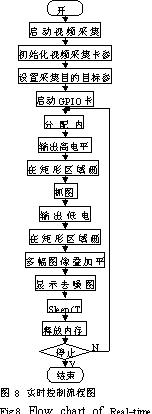
(1) 延迟时间T设置在低电平中,可间接控制监控图像频率。
(2) 流程图中循环的次数就是最终送到监视窗口的图像幅数,事先要计算出来,它与监控时间t1、一次循环所需要的时间t2有关,若设循环次数为n,则它们之间的关系为:n=t1/t2,其中:t2=tH+tL。
4 数据库管理系统
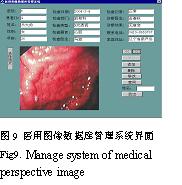
医用图像系统内嵌了医用图像数据库管理系统,用来管理病员资料,可供临床科室医师随时查阅大量病员资料,可通过患者编号、姓名、性别、年龄等信息查阅,做到了术前和术后的图像对比。可以将处理后的图像直接存储于数据库中,以用于进一步的分析或识别。卡片式显示,可以对记录进行显示、添加、删除、修改、查询等,并对进行操作的数据保存。不仅具有灵活性和方便性,而且功能较强,其界面简洁、直观,如图9所示。
5 结果与分析
(1)本系统中实现了多幅图像叠加平均去噪、灰度线性变换、直方图均衡化、边缘提取等多种图像处理方法,用户可以根据具体情况对单幅图像进行处理,以 达到理想的效果。
(2)监控程序经过多次修改参数,反复调试,以使得既能最大降低X光辐照量,又能使得图像画面清晰,达到了理想的效果。但是通过实验发现,降低X光辐照量与图像画面清晰是成反比的,如叠加图像的幅数越多,去噪效果越好,这样抓图的时间就越长,X光辐照时间就越长。所以选择参数时,要权衡利弊,视具体情况而定。
(3)减少X光辐照剂量前后的照射时间之比:![]()
如果参数取值为:m=2,f=20hz,biHeight=227(像素点),biWidth=236(像素点),T=0,则有:
![]() 秒
秒
![]()
若CPU主频为1.1Ghz,平均每条程序语句需CUP计算50次,则t=0.05us,
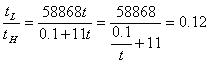
![]()
由此我们得出:若不减少X光辐照量的照射时间为1.12秒,减少X光辐照量的照射时间为1秒,而有0.12秒的时间X光不照射,可见减少的幅照量非常可观。
(4)如果参数取值和(3)相同,则:
![]() 秒,满足
秒,满足![]() 秒。
秒。
监控图像频率:![]()
(5) 介入治疗手术中,不需要监控图像是连续的,故可根据临床的具体情况来设置T值,以最大限度来减少X光辐照量,当T值较大时,![]() 。
。
参考文献
[1] Christian Daul,Pierre Graebling & Ernest Hirsch. From the Hough Transform to a New Approach for the Detection and Approximation of Elliptical Arcs. Computer Vision and Image Understanding. 1998,72(3):215-216,.
[2] Lei Xut & Erkki Oja. Randomized Hough Transform (RHT). .Basic Mechanisms, Algorithms and Computational Complexes, Image Understanding.1993,57(2): 131-154
[3] 章毓晋.图像处理和分析[M].北京:清华大学出版社,1999:72-213
[4] 王龙,汪天富等。基于灰度直方图均衡的超声医学图像增强方法,四川大学学报,2002,34(1):106-108
[5] 黄晓凌等.基于小波分析的X射线照片增强研究. 武汉大学学报.1998,44(1):121