- 02/28
- 2006
-
QQ扫一扫

-
Vision小助手
(CMVU)
基于临界灰度值和亚像素的“边缘寻找”算法
本文将围绕一个实例,主要就测量物体长度的算法加以阐述。现在假设我们要在图像中测量物体的长度。如图1所示,虚线内为图像范围,图中背景为白色,被测物呈黑色。
图1 待测物体情况
在相机拍照后,将图像视频信号传至视觉卡,由视觉卡把波状视频信号翻译成数字信号,存到电脑的内存中去。储存信息如图2所示,图像中的虚线格子为像素单元。下面将具体说明基于临界灰度值和亚像素的边缘寻找算法。
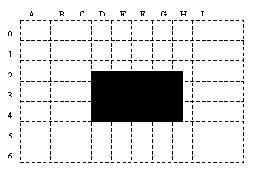
图2 内存中的存储信息
1、系统的自学习
接下来第一步,我们要先选取一个临界灰度值(threshold,有关这个名词的解释,请参阅主题文章“视觉系统速成”)。大家已经知道,当图像转换成数字信号存到内存中去之后,我们便可以轻易地读取任何像素的灰度值。比如,我们现在从图像中得到行3的全部像素灰度值(如图3所示)。为了方便,这里假定此系统的灰度值分辨率是256级,0为最黑,255为最白。

图3 图像中第三行的像素灰度值情况
从图中,我们可以看出被测体的范围(X轴方向)是从列D至列H。在行3的灰度值中,从列D到列H的灰度值分别为:50,40,40,35,80。由此可知,被测物体在成像中灰度值最高(即颜色最白)的像素的灰度值是像素(3,H)的灰度值,即80。那么我们便可以认为,系统的临界灰度值就是80,当然在实际测量中为留一定余地,我们不妨设为100。当然,若成像中被测物为白色,则应当选颜色最黑的地方的像素值为临界灰度值(有关临界灰度值设定的具体方法,以后另题讨论)。设定临界灰度值后,系统便完成了测量的第一步:自学习。假如此时已经完成了系统的标定工作(包括相机标定、系统标定),那么现在就可以正式开始测量了。
2、测量中的临界灰度值算法
我们把一个待测的被测物放到相机下拍照。在内存中所得图像如图4所示。这里图4与图2略有不同。这只是为了说明在实际操作中,每次拍照所得到的图像,必定是有所不同的。
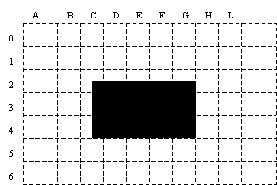
图4
得到图像后,我们便可以让软件对图像进行分析。仍是以行3为例,假设系统是从行3开始进行逐点扫描的。扫描的过程如下:先读取像素(3,A)的灰度值来与刚才所设定的临界灰度值作比较。如果像素(3,A)大过临界灰度值,也就是说像素(3,A)的颜色比临界灰度值白。那么这个像素就不是被测物上的一个点。然后就继续进行下一步的运算,读取像素(3,B)的灰度值重复上述运算,如此循环直至图像尽头列L。基本程序可描述如下:
for (I=A; I<=L; I ++)
{
if(pixel[3,I] <= 100)
{
flag = TRUE;
break;
}
}
程序中的100就是刚才系统所设定的临界灰度值。Flag是一个标志,当系统找到被测物的第一个边缘时,flag = TRUE,于是系统便开始寻找第二个边缘。在本例中,第一个边缘是由白到黑,第二个边缘是由黑到白。
假设在新的图像中,行3的灰度值如图5如示。那么系统扫描到像素(3,D)时,程序便会中断,flag = TRUE, 并开始寻找第二个由黑到白的边缘。
![]()
图5 新的图像灰度值情况
第二次寻找基本程序如下:
for (J=I; J<=L; J ++)
{
if(pixel[3,J] >= 100)
{
flag = FALSE;
break;
}
}
按图5所示,第二边缘的寻找,进行到像素(3,H)时,便自动停止。现在我们根据程序运行中第一个变量I所记录的数值,知道第一个边缘为D。由变量J知道第二个边缘是H-1=G。由此,可以知道整个被测物X轴方向的大小=G-D=4个像素。4×像素值(由系统标定得到),我们就最终得到被测物体的左右长度了。
但事情并没有这么简单,现在真正的问题出现了。实际上,不难发现在图4中,被测物实际上从列C开始的。只不过在列C中,被测物只有一部分,而另一部分是白色的背景。下面,我们就要设计新的算法,即“亚像素算法”来计算这种“一半一半”的部分。
3、亚像素算法
亚像素算法的基本思路就是将一个像素再分为更小的单位。在我们上面的讨论中,一直以8bit的系统作例子,也就是说1个像素的灰度值分为256级。所以,以这类系统为例,进行亚像素计算就要把像素分为255个小单位。
或许,可以这样来理解“亚像素算法”。一个像素的灰度值从0到255,0是纯黑,255是纯白。不妨把像素想像成是一个由255个小像素所组成的集合。而每个小像素都是一个独立的小镜子,那就是说一个像素里面有255个小镜子。灰度值则可以看作反光的小镜子数量:0表示255个小镜子全都没有反光;255表示255个镜子一起反光。上面讲到的所设定的临界灰度值100,则可表示255个镜子中有100个在反光,另外155个镜子没有反光。
现在,回到上面的测量例子中来。从图4中可以看到,被测物在列C中只有一半,而正是由于这个原因所以列C的灰度值是高于临界灰度值的。只要我们把这部分也算到最终测量数据中去,所得到的结果必定更为准确。由此大家可以知道,真正的计算被测物的长度公式,并不是(像素数量×像素值)这么简单,而应该是((像素数量+第一边缘亚像素值+第二边缘亚像素值)×像素值),具体到本例,被测物左右真实长度=((4+像素(3,C)亚像素值+像素(3,H)亚像素值)×像素值)。
如何算亚像素值呢?非常简单,亚像素值(白色部分)=该像素灰度值/256;亚像素值(黑色部分)=1-亚像素值(白色部分);仍以图4为例,像素(3,C)的亚像素值=1-(120 / 256)=0.53; 像素(3,H)的亚像素值=1-(180/256)=0.3。而整个被测物左右实际长度为4.83个像素。其实就是在算有几个镜子在反光,有几个没反光罢了。
另外,除了这种计算方法,还有其他几种计算亚像素值的方法:
(1)亚像素值(白色部分)=(该像素灰度值×(临界灰度值/256))/256
亚像素值(黑色部分)=1-亚像素值(白色部分)
(2)亚像素值(白色部分)=后像素值/ (前像素值 +后像素值)
亚像素值(黑色部分)=1-亚像素值(白色部分)
(3)亚像素值(白色部分)=(像素值-前像素值)/ (后像素值-前像素值)
亚像素值(黑色部分)=1-亚像素值(白色部分)
以上就是亚像素算法的基本原理。在结束这个算法讨论之前,有两点必须注意:一是在实际情况下,大家不可能看到图4中所显示的情况,即像素的一半是黑色另一半是白色,这只是为了方便大家理解所画出来的,而真实的情况是一个像素就只是一小块灰色,没有明暗的分别。明暗的区别只能在像素与像素间显现出来;二是在描述亚像素的基本算法时,所说“小镜子”的概念完全是为了方便大家理解,比纯数学语言表达更为易懂。