- 09/26
- 2006
-
QQ扫一扫

-
Vision小助手
(CMVU)
摘 要:彩屏WinCE智能脉冲全站仪不仅融合了摄影测量与工程测量的双重优势,还实现了真正意义上的无接触测量,在工程测量、变形监测、三维建模方面具有广泛应用;本文在分析全站仪图像采集系统及图像处理系统的基本原理的基础上运用实例对该全站仪在景观测量方面应用进行了初步研究。
关键词:摄影测量 三维模型 图像全站仪 地形信息
0 前言
彩屏WinCE智能脉冲全站仪是拓普康公司研制的新一代GPT-7000i系列全站仪,又称图像或摄影全站仪。该全站仪基于数字摄影测量基本原理,以WinCE操作系统为平台,结合图像处理系统完成图像采集、图像处理,最终建立三维虚拟模型;同时又获得点、线、面等基础地理信息。智能脉冲全站仪不仅融合了摄影测量和工程测量的双重优势,实现了空间属性和物理属性的同时获取;还可以不在测量现场布设控制点,实现真正意义上的无接触测量。对全站仪进行原理分析和应用研究具有重要意义。
1 原理分析
彩屏WinCE智能脉冲全站仪基于近景摄影测量原理进行影像信息、地形信息的采集。近景摄影测量虽然与摄影测量在理论上是一致的,但近景、地面摄影测量与航空、航天摄影有很大差异【1】。
如:摄影深度和高差,在近景摄影测量中,其量测的深度远远大于航空摄影测量的航高差;坡度的影响,在近景摄影测量中成90度的坡度在航空摄影测量中可能是平坦的地域;摄影条件的影响,在近景摄影测量中无论是遮挡还是测量地域的限制,问题都大的很多。
因此,近景摄影测量在实际情况中所面临的问题比航空航天摄影测量中复杂的多【2】。全站仪所采集的影像信息经过图形处理,提取出空间数据和纹理数据,再将空间数据进行内插值构建成立体三角网,然后根据所记录的空间数据和纹理数据的对应关系,在对应立体三角网格上贴上纹理,最终形成三维虚拟模型。
彩屏WinCE智能脉冲全站仪集成了两个成像芯片CMOS传感器:一个直接构成广角CCD相机,相机焦距为8mm;另一个与望远镜同轴,构成长焦CCD相机,相机焦距为248.46mm。全站仪在照准目标点的同时可拍摄周围的影像信息。图像全站仪无棱镜时测距范围为1.5~250m,精度为 5mm;有棱镜时测距范围是3000m,精度为 (2mm+2ppm)。该仪器采集影像信息时有两种工作模式:①简单测量模式:广角CCD相机采取换测站方式进行拍摄像对,由于GPT-7000i上的CCD相机只有30万象素,此时只能粗略测量。②标准测量模式:需要一台高分辨率、大像幅的数码相机。标准测量的实质是:无反射棱镜的全站仪测定控制点的空间坐标X,Y,Z;用 CCD相机记录控制点的点位影像;用大面阵、高分辨率的影像摄像机记录影像。在进行摄影测量时必须将CCD相机记录下控制点点位的影像与高分辨率的影像进行精确配准,这时才能利用控制点求得大幅面相片的外方位元素,从而进行测图【3】。
智能脉冲型图像全站仪在获取多组的像对后,便可进行影像信息处理。该过程是在Pi-3000lite软件里进行的。Pi-3000lite软件是基于OpenGL的透视成像原理与摄影测量成像机理一致性:
其中,(x,y)为像方量测坐标;(x0,y0)为像主点偏心坐标;f为焦距;(X,Y,Z)为物方坐标;(XS,YS,ZS)为相机位置;(a1,b1,c1, a2,b2,c2, a3,b3,c3)为对应的系数矩阵建立的【4】。它将图像全站仪采集的影像信息数据处理后,在OpenGL平台里以三维模型显示出来的。
2 全站仪相机校准
校准的准确与否将影响摄影测量的精度。根据全站仪构造可知,广角CCD相机位于望远镜顶部,摄影机与望远镜的光学系统不同轴,这就全站仪就会有三个坐标系:地面坐标系、全站仪坐标系与摄影机坐标系;摄影机坐标系与全站仪坐标系不重叠,它们之间的差异称为图像全站仪摄像机的偏置量【2】。由于广角CCD和望远镜同轴CCD是镶嵌固定在全站仪内的,因此偏置量应是个常数,所以说可以纠正,该纠正是在仪器里自动进行的,但是必须保证双相机在准确校准的前提下。相机校准过程具体如下:
1.长焦相机校准:
首先打开仪器到长焦影像 ,点击[放大]或[缩小]改变影像放大系数为1.00。再通过望远镜瞄准校验点,使望远镜十字丝精确位于校验点中心,如图1所示;然后检查屏幕上长焦影像十字丝是否也精确位于校验点中心。如果是,则无需检校,直接进行广角影像检校;否则要通过点击[向上][向下][向左][向右],移动屏幕上十字丝精确照准校验点,点击[设置]完成该次校正。

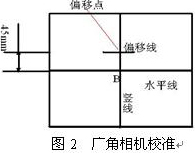
2.广角相机校准:
如图2所示,在白纸上或者通过网格线的交点画一个粗的十字交叉线,然后在粗水平线上方45mm处画一条横的粗的偏移线。广角相机的检查和校准过程与长焦相机校准步骤完全一致。唯一的区别在于:在广角相机校准过程中,望远镜十字丝瞄准的是B点,而影像上十字丝要瞄准是上图所示的偏移点。
3 实例运用
下面以采集一块面域信息并实现三维建模同时获取基础地理信息为例来介绍WinCE智能脉冲全站仪及图像处理软件在景观测量中的应用:
3.1 准备工作
本例选择了某建筑物一墙壁为对象,利用GPT-7000i系列彩屏WinCE只能买中全站仪采集其面域信息并经图像处理建立三维模型。相机校准关系到整个影像数据采集的精度,因此相机校准放在首位。相机校准分为长焦和广角:长焦相机校准距离(仪器到校验点的距离)至少要达到15m;广角相机校准距离(仪器到标准校验点的距离)约5m。具体校准过程参照第三部分。
3.2 地形观测站的选取
在测量之前,首先要建立坐标系即所测目标所处坐标系。测量坐标系通常采用的是高斯坐标系,建立坐标系的方法有两种:一是从国家测绘部门购买坐标数据或GPS定位获得数据,建立可接入国家标准地理网的坐标系;二是根据现场测量情况,建立独立坐标系,此时需对初始测控站进行假设,同时利用指北针来确定方位角,从而建立独立坐标系。这两种方法均可得到逼真的三维虚拟模型,只是所得空间数据不同:前一种方法可得到国家地理网的数据,不足之处就是费用昂贵;后一种方法方便简洁,不足之处就是不能得到国家标准地理网数据。由于无需介入国家标准地理网,本例采用的后一种坐标系建立方法。本例建立的坐标系为正北方为X方向,以东方为Y方向、高程H为Z方向的坐标,初始勘测点为S1(500.00,500.00,100.00)。
地形观测站的选取要求尽可能的观测到所测目标的各个特征点(即地形变化比较明显点等),同时通视性良好此点与普通全站仪的要求一致。基线(采用简单工作模式时两测站之间的距离)与所测目标的距离一般为1:5。由原理可知,智能脉冲全站仪有两种工作式即简易工作模式和标准工作模式,此处介绍使用方法,采用的是简易工作模式即由两个测控站实现拍摄像对的工作模式。
3.3 数据采集
数据采集包括几何数据和纹理数据的采集,此工作是同时进行的,数据的采集是利用图像采集软件Field Orientaiton 来完成。在数据采集之前,需知道一个已知的后视点,用来初始化影像测量。后视点一般选择在各个观测站都能通视到或已知空间坐标的点。在本例中,建立好坐标系后,后视点是通过测量来获取的点b(X:504.8066,Y:496.8186,Z:100.1510)。进行完视点的初始化,就可进行数据的采集了。数据采集是全站仪在望远镜测量坐标数据同时广角相机记录影像信息,如此类推,在测控站一测量完所有的像点,就转下测控站。在测控站二,测量前的工作与测控站一相同,不同的是测量控制站的坐标要换为新的坐标S2(X:499.9610,Y:492.9158,Z:100.0220),后视点不变。用同样方法采集数据,在此站测量的像点与第一站测量一致,此时软件会自动配成像对。依次采集信息数据同时进行影像配对。最后在从旁边进行采集边侧数据记录并连成线构成边框线,以确保图像像处理在此区域进行,提高测量准确度。标准测量模式与此不同的是在测量完第一个测控点后再用高分辨率的数码相机拍摄纹理,在进行相片配对。
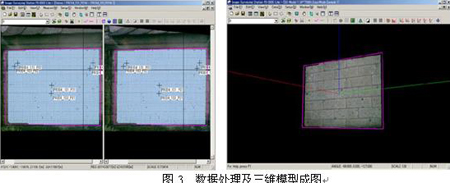
3.4 图像数据处理与三维模型建立
图像脉冲全站仪采用了以WinCE智能操作系统为平台的PDA移动存储技术,可以把获得数据信息直接存入到全站仪进行保存后可通过CF卡(PDA与计算机连接数据线或者RS232串口线)转移到计算机上,导入到图像处理软件Pi-3000Lite里进行图像处理。Pi-3000Lite图像处理软件将所测空间数据与纹理数据进行匹配,然后在OpenGL平台里以三维显示出来。图像采集软件将数据记录为图片和数据文档两种格式,图片记录的是目标点的影像信息,数据文档记录的是目标点的空间位置坐标和影像配对信息。图像处理软件将数据导入后,首先在像对上选择理想的数据,建立初步的网格数据,再运用内插值算法进行插值,然后自动连接构成立体三角网,最后根据几何数据和物理数据匹配信息,将纹理贴在对应的网格上,便可构成三维模型在OpenGL平台显示出来,如图3所示。在三角网内插同时,计算出了所插入点的空间坐标信息,连线构成拓扑网络,在该软件里可以查询出点、线、面等基础地理信息。该软件可进行二维图形和三维模型的放大、缩小、旋转等基本操作。
4 结论与展望
本文对彩屏WinCE智能脉冲全站仪进行了原理的分析和应用的初步研究:该全站仪将CCD相机与全站仪结合起来,充分发挥了摄影测量和工程测量的双重优势;实现了真正意义上的无接触测量。智能脉冲全站仪的运用,必将很大地推动数字摄影测量的发展,尤其是近景摄影测量的发展。该全站仪可广泛运用于工程建筑测量、变形监测、城市虚拟,测量弹体运动速度与轨迹,弹着点定位,以及工业、生物医学等。
参考文献:
[1] Mikhail.E.M,Bethel J.S. Meglone J.C.,Modern Photogrammetry[M],USA:JOHN WILEY & SONS.INC.2001.
[2] 张祖勋 论摄影测量与工程测量的结合 [J]. 地理空间信息 2004.12 第02卷第6期
[3] Topcon Corpration Operation Manual for Imaging Total Station GPT-7000i Field Orientation Software
[4] 张祖勋,苏国中等 OpenGL成像机理及其与摄影测量方位元素的相关分析[J]. 武汉大学学报 • 信息科学版 2004.07 第29卷第7期
[5] 冯文灏 近景摄影测量——物体外形与运动状态的摄影法测定 [M] 武汉大学出版社 2002.
- 上一条:印刷电路板缺陷自动检测系统
- 下一条:CCD纸张检测系统的设计