- 05/05
- 2009
-
QQ扫一扫

-
Vision小助手
(CMVU)
摘要: 设计了一套基于机器视觉的作物对行喷药控制系统。首先由CCD摄像机拍摄成行作物图像, 提取其色调值图像并用最大类间方差法二值化后, 经数学形态学腐蚀后用Hough变换方法拟合作物行中心线, 最后步进电机移动其喷头标识来对准此作物行。实验验证了该方法的正确性。
关键词: 机器视觉; Hough变换; 作物行中心线;
喷药控制长期以来, 人们在农作物病虫害防治过程中都是采取人工喷洒, 一方面对人身伤害很大, 另一方面不能精确对准农作物, 不仅浪费了农药, 而且喷在土壤中的农药易造成环境污染。机器视觉技术以其代替人眼进行测量和判断的特点, 在现代农业精准技术应用中表现出了强大的活力。因此将机器视觉引入农药施药控制, 研制一种基于机器视觉的高效可行的喷药装置, 让机器代替人在田间作业的同时能比较精准地对准农作物喷药, 以降低人的劳动强度, 对提高药效和保护农田环境具有十分重大的意义。国外在这方面做了一些研究, 如美国的依利诺大学农业工程系田磊[ 1 ]等开发的“基于机器视觉的西红柿田间自动杂草控制系统”和“基于差分GPS的施药系统”; 美国加利福尼亚大学戴维斯分校研制的基于视觉传感器对成行作物实施精量喷雾系统[ 2 ] 。Giles等[ 3 ]研制了一种基于机器视觉的精确喷药装置。2002年S« gaard等[ 4 ]提出了一种不需要经过图像分割处理找到作物行的方法, 这种方法对那些细小作物很有效, 其目的是为农业机械行作业或行间作业提供自动导航。2004年! strand等[ 5 ]研究出了一种基于作物行的农田机械作业系统。该系统是通过Hough变换的方法来定位作物行, 有较强的鲁棒性, 能适应不同作物的大小和找到两行或更多的行, 而且能找到作物行的终端, 对长满杂草的农田环境也有很好的适用性。作物行定位精度根据作物的大小其标准差在016~112 cm之间。而国内相关的研究还停留在前期和摸索阶段。如中国农业大学袁佐云等[ 6 ]用过绿色特征值分割作物与背景, 从而得到作物的行中心线。国内对基于机器视觉的农作物行作业系统的研究主要在检测作物行中心线方面, 就基于机器视觉的作物行作业系统的实际应用如农业机械导航或喷药控制系统尚需深入研究。笔者从这一角度出发, 对基于机器视觉的作物对行喷药控制问题进行了探索和实验。
1基于机器视觉的自动施药技术难点
基于机器视觉的自动施药技术难点主要有以下3个方面。一是施药目标的自动识别。如何让机器代替人在复杂的农田环境中自动识别农作物, 这是自动施药必须首先解决的问题。在这方面农田中杂草对作物识别带来很大影响, 很多情况下容易把杂草当成作物造成误识别, 杂草的识别国内外已有研究, 而且也取得了一定的成果, 但目前仍难于从根本上解决这一问题。另外作物的识别很大程度上也取决于环境中光照强度, 不同的光照强度会给作物与周围环境带来不同的色差影响, 甚至导致无法正确识别作物。因此需要开发出一种在不同光照强度下自动识别作物的算法。这方面国内外研究还仍在探索阶段,往往采用的是某种或几种光照强度下所采用的自适应识别算法。二是控制施药的方式。目前主要有两种方式: 固定喷头和移动喷头。固定喷头方式的施药机理是喷头下方有作物时喷药, 没有作物时则不喷药。移动喷头施药则是发现作物时主动移动喷头去施药。前者已经基本解决, 后者国内外正在摸索阶段。三是喷药量的控制。即控制喷幅或喷压, 也即控制喷头的流量, 这一问题的解决办法可采用脉宽调制技术( PWM) [ 7 ] 。笔者将主要对第二个难点中移动喷头对准作物行进行研究。
2基于机器视觉的自主对行方法
2.1农作物图像的预处理
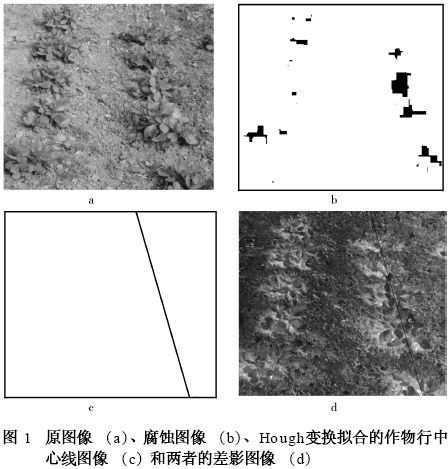
由于农田环境的复杂性, 农作物生长过程中往往有杂草的情况, 为了简化研究对象,假设作为研究对象的作物是绿色而且成行种植, 任何两行之间等距, 相邻两行不交叉和没有杂草等。图1 - a为用CCD摄像头拍摄的一幅田间蚕豆作物图像, 大小为640 ×480像素, 格式为BMP真彩色图像, 其处理过程如下。
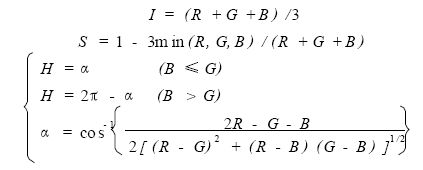
针对农田作物环境中出现的作物在阳光照射下产生阴影, 作者通过多次试验得出先将作物图像从RGB图像转换到HSI模型, 再提取其色调值图像, 这样可以减少阴影对作物与背景分割的影响。RGB图像既包含颜色信息, 又包含亮度信息, 不是一个直观的表色空间, 而HSI模型的每个分量都有明确的物理意义, 是一种适合人的视觉系统感知彩色特性的判别模型, 将RGB转为HSI空间的公式如下:
作物与背景分割后, 为进一步方便处理将其进行二值化, 这里采用最大类间方差法(又称OSTU法) 。采用该方法的优点是当出现图像直方图有双峰但无明显低谷或者是双峰与低谷都不明显, 且两个区域的面积比也难以确定的情况时, 采用最大方差自动取阈值法往往能得到较为理想的结果[ 8 ] 。其基本原理为: 设t是分离目标和背景两区域的阈值, 背景区域面积占整个图像面积的比例![]()
腐蚀在数学形态学运算中的作用是消除物体边界点。用CCD摄像头拍摄时图像中难免会出现两株作物甚至多株作物连在一起的情况, 为了将每株作物区分开来, 所以在二值化图像的基础上进行腐蚀。
如果结构元素取3 ×3的黑点块, 腐蚀将使物体的边界沿周边减少一个像素。另外, 腐蚀还可以把小于结构元素的物体去除, 这样选取不同大小的结构元素就可以去掉不同大小的物体。如果两个物体之间有细小的连通, 那么当结构元素足够大时, 通过腐蚀运算可以将两个物体分开。通过腐蚀方法可以将每株作物逐渐向它的重心收缩, 而且在拍摄中由于角度的影响往往存在两株作物之间有细小的连通, 通过这种方法也可以方便地将两株作物区分开。实际过程中作者采用3 ×3的单位矩阵为结构元素对图像进行多次腐蚀(依作物每株的大小而定) (图1 - b) , 图1 - c是经12次腐蚀后再用Hough变换后得到的作物行中心线图像。为了检测结果的正确性给出了其差影图像(图1 - d) 。
2.2作物行中心线对行方法
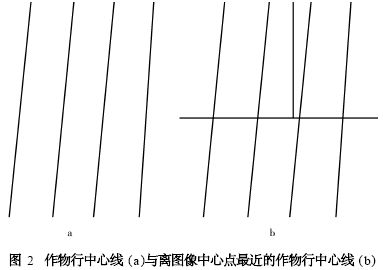
通过CCD摄像头拍摄的作物图像信息量比较大, 设计对行喷药装置时, 如果针对每行作物都移动一个喷头来对准, 首先是图像处理的信息量太大很难满足实时要求, 其次多个喷头移动的控制也是个难题。因此如前假设作物严格按等间距种植, 这时只要一个喷头对准一行作物, 其余的喷头间距按作物行间距设计就可以使之自然对准其他作物行。实际操作时在采集的作物图像中采用提取一行作物的办法, 可以大大减少图像处理的信息量, 同时又能较好地满足对行喷药的需要。另外如果将作物图像中所有行的中心线都提取出来, 则可按照下面步骤进行。首先从图像中心点开始由水平方向进行行扫描, 找到与图像中心点横坐标距离(欧几里德距离) 最近的线; 其次如果出现两行作物都与图像中心点横坐标等距情况, 则再从图像中心点由垂直方向进行列扫描, 找到与图像中心点纵坐标距离最近的线。最后通过移动对行装置来对准离图像中心点行列方向都最近的作物行。图2为这一过程的模拟图像。
3基于机器视觉的对行实验
本研究设计了步进电机带动齿轮齿带的对行方法。即在齿带上安装一条软管作为喷头标识, 用来检验是否对准作物行中心线。
实验时在一辆通用的小四轮拖拉机上放置一台Pentium Ⅱ联想计算机, 内存256 M。拖拉机后面有一对行喷药装置, 主要由步进电机、控制器和齿轮齿带组成。按以下流程进行对行实验: 开始—图像预处理—找到一条要对准的作物行中心线—通过摄像机标定确定与作物行垂直方向的位置—由标识初始位置计算与作物行中心线的位置偏差—计算向步进电机发送的脉冲数—步进电机带动齿带标识移动到相应位置—结束。这一过程完成后, 设定定时时间为2 s, 采用多媒体定时器对程序进行定时处理, 让图像采集处理和喷头移动对准作物行连续进行。为了便于实验, 我们在水泥地模拟了绿色作
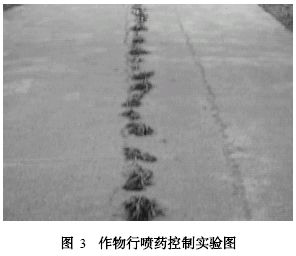
物行进行实验, 实验过程中为了反映喷头移动的轨迹和车辆前进的轨迹, 以检验算法中对行的效果和拖拉机行驶路径对算法的影响, 我们在拖拉机上分别设计了两个漏水装置, 这样拖拉机前进时在水泥地上就能比较清楚地显示两条轨迹。图3为人驾驶车辆轮速为1 m•s- 1时的对行喷药控制情况, 左边水的轨迹为喷头移动时的轨迹, 右边为车辆前进的轨迹。其中对行喷药最大偏差为10 cm, 其RMS ( rootmeansquare) 误差为2 cm。出现偏差的原因是摄像头在拖拉机行驶过程中振动比较厉害, 且实验过程中暂时没有考虑轮速这一情况, 后续实验应减少摄像头的振动和增加轮速传感器, 以进一步提高对行精度。从图3来看喷头移动的轨迹基本与作物行的轨迹一致, 表明了该实验中所用的图像处理算法和所采取的控制方式是可行的。
4 结论
1) 将作物图像从RGB模型转换到HSI模型, 提取色度图像并用最大类间方差法二值化后, 采用3 ×3的结构元素对图像进行数学形态学腐蚀, 通过Hough变换的方法较好地拟合了作物行中心线, 并验证了该方法的正确性。
2) 针对多喷头对多行作物施药问题, 提出采用单个喷头对准离图像中心点距离最近的作物行喷药控制的方法。
3) 设计了由步进电机带动齿轮齿带, 并在齿带上安放喷头标识来对行的装置。实验结果表明, 在作业速度为1 m•s- 1的情况下, 齿带上所带的喷头标识能较好地对准作物行。
参考文献:
[ 1 ] Tian L, Slaughter D C, Norris R F. Outdoor field machine vision identification of tomato seedlings for automated weed control [ J ].Transaction of the ASAE, 1997, 40 (6) : 1761 - 1768
[ 2 ] Tian L, Reid J R, Hummel J W. Development of p recision sp rayer for site2specific weed management [ J ]. Transaction of the ASAE,1999, 42 (4) : 893 - 900
[ 3 ] GilesD K, Slaughter D C. Precision band sp raying with machine2vision guidance and adjust able yaw nozzles [ J ]. Transaction of theASAE, 1997, 40 (1) : 29 - 36
[ 4 ] S« gaard H T, Olsen H J. Determination of crop rows by image analysis without segmentation [ J ]. Computers and Electronics inAgriculture, 2003, 38 (2) : 141 - 158
[ 5 ] ! strand B, Baerveldt A J. A vision based row2following system for agricultural field machinery [ J ]. Mechatronics, 2005, 15: 251 - 269
[ 6 ] 袁佐云, 毛志怀, 魏青. 基于计算机视觉的作物行定位技术[ J ]. 中国农业大学学报, 2005, 10 (3) : 69 - 72
[ 7 ] 陈勇, 郑加强, 周宏平, 等. 精确农业管理系统可变量技术研究现状与发展[ J ]. 农业机械学报, 2003, 43 (6) : 156 - 159
[ 8 ] 何斌, 马天予, 王运坚, 等. Visual C + +数字图像处理[M ]. 北京: 人民邮电出版社, 2001: 461 - 462
- 上一条:一种基于知识库的图像对象自动识别方法
- 下一条:应用于印刷品质量检测的机器视觉系统