- 06/02
- 2009
-
QQ扫一扫

-
Vision小助手
(CMVU)
摘要:移动机器人武器是现代高科技在战争中的具体应用,其目标跟踪系统与其它武器目标跟踪系统相比有其自身的特点和不同。本文以机器视觉为理论基础,利用小波变换对武器系统采集到的序列图像进行去噪处理,提出了复杂背景下运动目标检测和跟踪的方法,为移动机器人武器目标跟踪系统的研究和设计提供了理论依据。
关键词:机器人武器系统;机器视觉;噪声消除;目标检测;目标跟踪
1 引言
信息探测、危险环境搜索、出奇不意的攻击等是现代战争的重要组成部分,移动机器人武器灵巧的机动性、良好的隐蔽性以及互相协同配合能力可为此提供全新的途径和手段。移动机器人武器目标跟踪系统与雷达成像、红外成像、电视成像等其它武器跟踪系统相比有其自身的特点和不同,主要体现在以下几个方面:
⑴ 移动机器人武器以人为作战对象,跟踪目标为类刚性。
⑵ 移动机器人武器目标跟踪时把人作为一个整体,不需要关于人的形状特征等较高层面上的知识。
⑶ 移动机器人武器作战时场景往往是未知的甚至是动态的,复杂场景增加了目标跟踪的难度。
机器视觉用计算机实现人的视觉功能,实现对客观世界三维场景的感知、识别和理解。根据机器人武器目标跟踪系统的特点,本文提出了基于机器视觉的复杂场景下类刚性运动目标的检测和跟踪方法。
2 目标跟踪系统体系结构
移动机器人武器目标跟踪系统由CCD摄像机、视频采集卡、近端操控计算机、无线通讯模块、远程操控计算机、驱动模块、伺服电机、武器载运装置等组成,系统的控制结构框图如图1所示。
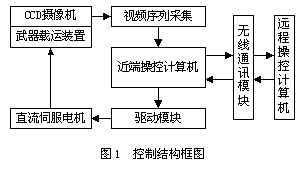
系统的工作过程可以描述为CCD摄像机采集现场视频信号,经采集卡传输给近端操控计算机,然后通过无线通讯模块上传给远程操控计算机;远程操控计算机对得到的图像序列进行分析,计算目标在每帧图像上的位置和运动参数,并以此为依据将控制信号通过无线通讯模块反馈给近端操控计算机,通过驱动模块、伺服电机最终驱动武器载运装置,使载运武器和CCD摄像机跟踪运动目标。该系统是一种典型的图像反馈系统。
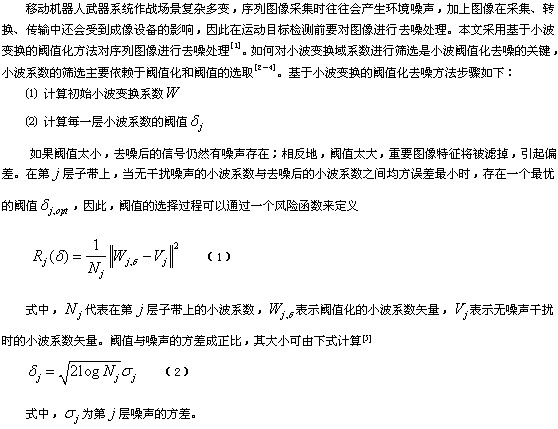
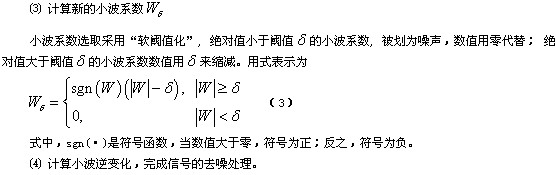
三 目标场景信号的噪声消除
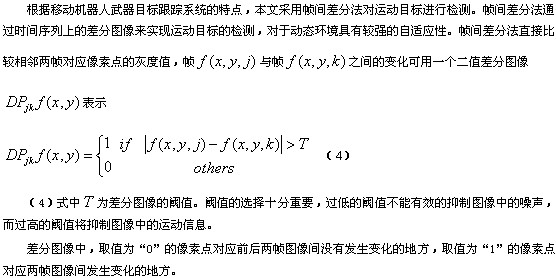
4 运动目标检测
5 运动目标跟踪
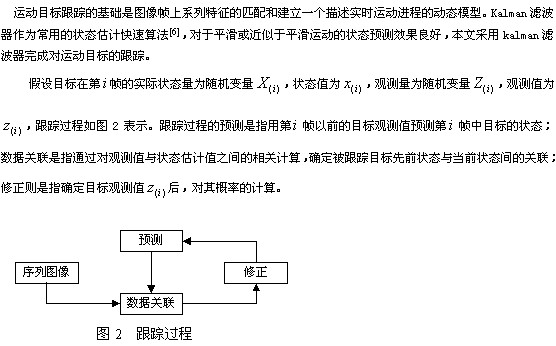
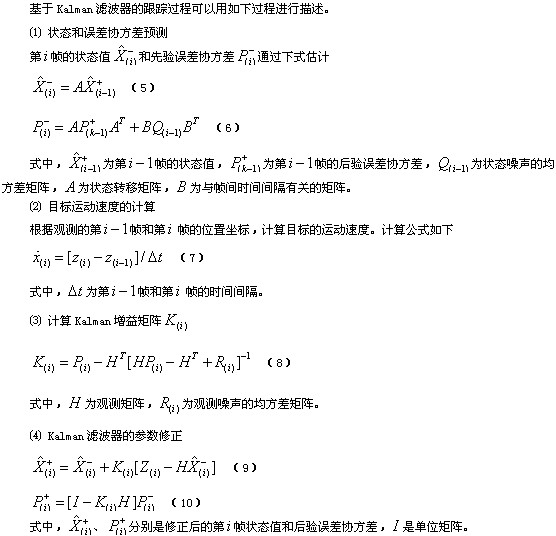
跟踪过程中,利用Kalman滤波器预测目标的位置,根据目标的预测速度和误差协方差确定目标的搜索范围。机器人武器目标跟踪系统通过远端监控器,人工锁定目标,不需要进行目标匹配。
6 结束语
本文根据移动机器人武器目标跟踪系统的特点,对以人为主要跟踪对象的类刚性运动目标跟踪技术进行了研究。实验结果表明,本文所提出的方法能较好地适应于机器人武器目标跟踪系统,具有较高的跟踪实时性和跟踪精度。
本文作者创新点:阐述了机器人武器目标跟踪系统的特点,将基于小波变换的阈值化去噪方法应用于机器人武器目标跟踪系统,利用帧间差分法对运动目标进行检测,提出了适合机器人武器系统的基于Kalman滤波的运动目标跟踪方法。
参考文献:
[1] 陈武凡. 小波分析及其在图像处理中的应用[M]. 北京:科学学出版社,2002:152-159
[2] Douzi H, Mammass D, NouboudF . Faber-schauder wavelet transform, application to edge detection and image characterization [J]. Journal of Mathematical Imaging and Vision, 2001, 14:91-101.
[3] Portilla J, Strela V, Wainwright M J, et al. Image denoising using scale mixtures of Gaussians in the wavelet domain[J]. IEEE Trans on Image Processing, 2003, 12(11):1338-1351.
[4] Malfait M, Roose D. Wavelet-based image denoising using a Markov random field a priori model [J]. IEEE Transon Image Processing, 1997, 6(4):549-565.
[5] Donobo D L. De-noising by soft-thresholding. IEEE Trans. On Information Thepry. 1995, 41(3):613-627
[6] 张雷,刘冀伟,王志良.固定场景下的运动检测与运动跟踪[J]. 微机算计信息, 2006, 22(9-1):287-289
- 上一条:应用于印刷品质量检测的机器视觉系统
- 下一条:增强现实一致光照技术研究