- 08/09
- 2017
-
QQ扫一扫

-
Vision小助手
(CMVU)
摘 要: 针对历史文物几何建模中的问题,提出了一种基于多结点样条的几何建模修补方法。利用多结点样条插值的局部插值显式特性,对立体视觉 摄像系统基于图像的几何建模中形成的“空洞”,可通过多结点样条插值算法将“空洞”填补起来,对有破损的陶器类文物的几何建模也可通过多结点样条插值算法进行修补。
关键词:多结点样条插值;几何建模修补;历史文物;立体视觉;基于图像的建模
1.引 言
历史文化遗产具有历史、艺术和科学价值,是不可再生的资源。国际社会和经济发展实践证明,历史文化遗产对一个国家、一个地区的全面发展贡献显著,其价值在多方面显现。文化遗产保护已成为世人的共识。将重要历史建筑、文物遗产利用计算机有系统地进行数字化,建立数字典藏资源,永久保存数据,提供全球共用,已成为世界各国文化发展的重要策略之一。大陆、日本和台湾等地的学者都尝试过用数字化技术展示文化遗产00 0。
利用电脑技术重构出历史文物,首先得进行三维建模。三维建模的方法可分为三类:第一类对较规则几何物体如建筑物等,可直接测量物体的坐标输入电脑,用常用几何建模软件如AutoCAD, 3D MAX等建立模型,这种技术相对来说已比较成熟;第二类对某些不规则的物体如佛像,出土文物等可采用三维激光扫描仪扫描测量物体表面的数据建立三维模型,但对某些文物,出土时已经发生局部破损,部分地方残缺不齐,给建模带来困难;第三类对于室外一些形状复杂不便测量数据又无原始图纸资料的风景、文物古迹的建模方法可直接采用基于图像的建模技术0-0通过一系列二维照片恢复和重构三维模型,但这种方法技术难度大,还有不少技术问题没有解决。
本文针对上面三维建模中的问题,利用局部显式插值算法的特性,提出了一种基于多结点样条插值算法的几何建模修补方法来解决上述问题。
2 .多结点样条插值算法
在二十世纪七十年代提出一种新的局部插值显式算法即多结点样条插值0-0 具有局部性,显式不求解方程组特性,插值性,且求解时无须给出节点切线信息,节点增多时插值多项式得阶数保持不变等优点。目前尚没有一种插值算法能全部满足以上五种特性。多结点样条插值为什么有如上所述特点,它又是如何构造成的?关于多结点样条的计算公式及详细推导请参考文献 0-0,在这里我们只给出简单描述。 次多结点样条基函数表示为
![]()
(2-1)
其中,![]() 为待定系数。符号
为待定系数。符号![]() 的含义为:
的含义为:![]() 且
且![]() 互不相等
互不相等![]() ,
,
即![]() 线性无关。
线性无关。![]() 为等距节点情形的k次B样条基函数,
为等距节点情形的k次B样条基函数,![]()
![]() 符号
符号![]()
当k=3时,多结点样条基函数的具体表达式如下:
![]()
(2-2)
以3次多结点样条基函数为例,从它的构造可以看出,它是由3次B样条拟合的基函数经过平移线性组合而得到,继承了3次B样条拟合的基函数的一些特性,如偶对称性,显式特性(不求解方程组),一阶和二阶导数连续性,大家知道,二阶导数的连续性可保证构造的曲线曲面的光滑性,同时由于经过平移和线性组合后,它又增加了3次B样条插值的基函数所不具备的特性,3次多结点样条插值基函数有![]() ,表明基函数在x=0处的值为1,用3次多结点样条插值得到的曲线公式0如下所示:
,表明基函数在x=0处的值为1,用3次多结点样条插值得到的曲线公式0如下所示:
![]()
![]()
(2-3)
式中![]() 为控制节点。同样,用3次多结点样条插值得到的曲面公式0如下所示:
为控制节点。同样,用3次多结点样条插值得到的曲面公式0如下所示:![]()
(2-4)
由于多结点样条插值算法的优越性,它已成功地被应用于飞机外形、进气道、机翼、海洋、地质的数据处理,多结点样条插值算法的理论也有进一步的发展和完善。
下面主要陈述利用多结点样条的局部性,插值性和便于计算的特性解决在进行历史文物三维建模中的一些问题。
3.双目立体视觉系统的三维重建修补
双目立体视觉00是计算机视觉的一个重要分支,即由不同位置的两台或者具有两个镜头的一台摄像机(CCD)经过移动或旋转拍摄同一幅场景,通过计算空间点在两幅图像中的视差,获得该点的三维坐标值。
双目立体视觉技术的实现可分为以下步骤:图像获取、摄像机标定、特征提取、立体匹配和三维重建。
本文以SRI Stereo Vision System (SRI SVS)00的双目立体视觉摄像系统在实验中拍了一组立体图像,整个系统的硬件部分由笔记本电脑、1394接口卡、立体视觉摄像机、外接电池组成,如图3.1所示,SRI SVS系统的软件包提供了摄影机校准、立体视觉求解等基本功能函数。避免了开发立体视觉求解算法上的重复劳动,图3.2显示了立体视觉软件采集澳门妈阁庙浮雕场景的立体图像对的界面。图3.3表示用该双目立体视觉摄像系统拍摄澳门妈阁庙墙面的浮雕通过求解场景深度后直接所获得的三维点云图像。由图中可以看出直接用点云生成的三维图像中有很多空洞部分,且有很多噪音点。图3.4为文献0的作者用SRI SVS系统获取的妈阁庙浮雕的点云数据进行初步噪声处理后,直接连接成三角面片后生成的浮雕图像,从图中可以看出,由于双目立体视觉系统采集的点云数据本身保留了点云数据间的拓扑关系,所以将相邻点连成三角网格后生成的浮雕比直接用SRI SVS系统获得的点云浮雕效果好很多,但是如前所述,由于立体视觉摄像原理本身的局限性,从图中可以看出,生成的三维浮雕存在很多空洞。

图 3.1 SRI SVS 系统实物图

图 3.2 SRI SVS 软件运行界面
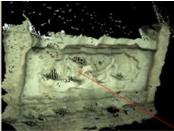
图 3.3 用SRI SVS系统拍摄澳门妈阁庙浮雕
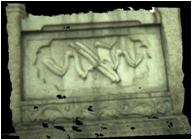
图 3.4 初去噪声后直接生成的澳门妈阁庙浮雕

图 3.5 插值补漏后的澳门妈阁庙浮雕
由此看出,在三维几何模型重建时,必须对这些采集到的点云数据在噪音过滤后还要进行空洞的修补工作。由SRI SVS系统采集的点云数据是一个MXN的矩阵,矩阵中的相邻点即为物体沿视线方向投影后的空间相邻点,空洞点在此点云数据矩阵中表示为坐标值和颜色值全为0的点。所谓噪声点即是指点的深度数据不在正常的阈值范围之内。利用多结点样条插值进行空洞补漏工作的具体方法如下:
(1)边界处理:由于双目立体视觉系统采集的点云数据矩阵P0(MXN)的边界也存在很多空洞点和噪声点(统称为非有效点),必须首先将边界中的非有效点进行边界处理,即将之替换成有效点。
经过这样的边界处理后,我们可得到数据矩阵P1(MXN),数据矩阵P1最大可能地保障了边界的准确性,从而保证了后续插值范围的准确性。
(2)插值处理:首先对边界处理后的点云数据矩阵P1逐行进行扫描,如果该行数据没有空洞点和噪声点,即该行全部为有效点,则该行数据全部保留。如果该行存在空洞点或噪声点,记录矩阵的行号 ,和该行所有有效点的数据,根据该行有效点的数据用多结点样条插值算法(参见公式2-3)插值成一行新的数据替换该行所有数据,这样我们可以生成一个新的插值矩阵P2。
(3)融合处理:将插值矩阵P2和经过边界处理的点云数据矩阵P1进行融合,生成最后的补漏矩阵P3:
如果P1中的点P(i,j)为有效点,则将该有效点P(i,j)复制到P3中相对应的位置(i,j)处。 如果P1中的点P(i,j)不是有效点,则将P2 中相对应的点P’(i,j) 复制到P3中相对应的位置(i,j)处。经过上述方法逐行处理,得到补漏矩阵P3(MXN)。
(4)由于补漏矩阵依然保留了原始点云数据点之间的拓扑关系,但是去掉了噪声点,补上了空洞点,所以用补漏矩阵P3直接连接成三角网格所生成的场景更加真实。
补漏方法后得到的浮雕图像,从图中可看出,原图3.4中的空洞已全部补上。从图3.3,图3.4,图3.5生成的三维浮雕图像比较看出,经过多结点样条插值补漏方法处理后生成的妈阁庙浮雕效果最好。
4.出土文物的几何建模修补
大家知道,陶器类古董出土时可能已遭到部分损坏,有些地方残缺不齐。用多结点样条插补的办法弥补残缺的外貌,可在电脑上展现古董的原貌。具体的插补办法描述如下:
(1)用三维扫描仪在出土的古董外表按照表面纹理方向扫描,测得三维控制点的数据(MXN型矩阵)。
(2)以扫描仪测得的数据作为控制点,利用多结点样条插值函数重新生成古董外表的点云数据,插值计算公式参见公式(2-4)。
(3)根据出土的古董,在平面上推断设计出陶瓷表面的印花图案。
(4)根据第2步所得点云数据构成网格表面模型,再用纹理映射的方法将平面印花图案映射到网格表面模型上,从而生成一个新的三维古董模型。
(a) 有破损的古董

(b)印花图案

(c) 插补后的古董
图 4.1 陶瓷古董几何建模修补的实例
图4.1 表示一个有破损的古董按上述方法修补的实例,在本例中,以作者设计的数据代替三维扫描仪测得的采集数据。从文献0提到的基于多结点多层次算法的曲面造型算法可知我们可用少量的原曲面数据重新生成的曲面几乎可和原始曲面相吻合,而陶瓷类古董的外表通常比较光滑,所以我们用三维扫描仪采样数据时,只需采样少量的控制点即可进行插值补漏,避免了数据冗余和繁琐的采样。
5.分析和总结
浮雕图像的插值补漏方法和陶瓷类古董的插值补漏方法都是采用多结点样条插值算法为基础。由于可利用的数据具不同特点,处理方法也有所区别。由于陶瓷类古董表面一般比较光滑,所以用较少的点插值出的曲面和用更多的点插值出的曲面效果差不多。但是浮雕就不一样,浮雕表面造型复杂,如果也用较少的控制点,插出的曲面效果会很不理想。浮雕的数据采样来自立体视觉摄像系统,用立体视觉摄像机拍摄后自动生成点云数据,不存在采样的繁琐问题,所以我们须将原始点云数据中的所有有效点的信息全部用上,效果才会更加逼真。通过以上实例,我们可以看出,对有破损的出土文物的几何建模可通过多结点样条插值的方法进行修补,对基于图像的建模方法中的问题,如用立体视觉摄像系统几何建模中形成的“空洞”,我们也可用多结点样条插值算法的局部插值性将“空洞”填补起来,解决了几何建模中存在的一些问题。
参 考 文 献
[1] “罗马的完成之道”,青柳正规,河边泰宏等,牛顿杂志,2003.10,P35-65, http://www.newton.com.tw .
[2] 《紫禁城•天子的宫殿》,故宫文化资产数字化应用研究所, http://big5. china.com.cn/chinese/CU-c/428257.htm.
[3] “数位博物馆计划”,“国家典藏数位化计划”,“国际数位图书馆合作计划”,台湾,国家数位典藏通讯电子报,http://www2.ndap.org.tw/ newsletter/index.php?lid=12
[4] Paul E. Debevec, Camillo J. Taylor, and Jitendra Malik,Modeling and Rendering Architecture from Photographs, Proc. SIGGRAPH 96.
[5] Debevec P, Borshukov G and Yizhou Yu. Efficient view-dependent image-based rendering with projective texture-mapping. The 9th Eurographics rendering workshop, Vienna, 1998. 105~116.
[6] Byong Mok Oh Max Chen Julie Dorsey Fr´edo Durand, Image Based Modeling and Photo Editing, Laboratory for Computer Science, Massachusetts Institute of Technology, Proceedings of Siggraph'2001.
[7] Qi Dongxu, On cardinal many-knot δ-spline interpolation (I), (II), (III)[J]. Natural science J. of Jilin Univ., 1975(3); 1976(2); 1979(3). (in Chinese).
[8] Qi dongxu, Matrix representation and estimations of remainder term of many-knot spline interpolation curves and surfaces[J], Computational Mathematics, 1982, 4(3):244-252. (in Chinese)
[9] 黄静,局部插值显式算法的研究及其应用,澳门科技大学2002级研究生博士学位论文。http://www.vision3d.com/stereo.htmlhttp://www. videredesign.com/[10] Marr, D. and Poggio, T. (1976). Cooperative computation of stereo disparity.Science, 194: 283-287.
[11] Marr, D. and Poggio, T. (1979).A computational theory of human stereo vision. Proceedings of the Royal Society of London B, 204:301-328. http://www.ai.sri.com/~konolige/svs/
[12] 张涛,基于立体视觉的图像建模技术的研究与实现,澳门科技大学2003级研究生硕士学位论文。
- 上一条:通用式三维即时成像技术
- 下一条:机器人视觉伺服技术的定义、分类及前景