- 分类:
-
全部 镜头 相机 传感器 采集卡 光源 传输及线材 系统产品 智能设备 解决方案 软件算法及深度学习 集成及工业计算机 机器人及机械臂 3D产品 行业综述 其他
展开
- 行业:
-
全部 汽车 芯片半导体 检测 电子组装 精工和光学 铁路 监控 安防 医疗 包装 光伏太阳能 航天航空 军事国防 LCD触摸屏 物流及拆码垛 药品 烟草 纺织 读码及识别 锂电 教学及科普 化学 陶瓷 纸张 木材 玻璃 农业 印刷 食品 造船 勘探 铁和金属 显微镜及生命科学 可回收资源 可再生资源 塑胶塑料 摄影测量和遥感 化妆品 电信 电力 智能交通 三维测量 体育 其他
展开
-

翌视科技LVM2300与LVM2500 3D线激光相机低噪声、高通光、高速成像特性深度解读
本文将介绍我司的LVM2300、LVM2500系列相机,其极致的成像效果和技术特点,将3D线激光产品的成像效果推向一个新的高度。检测精工和光学2024-05-10 | 中国机器视觉网 |1930 -

深入了解MERLIC产品应用,不懂编程也能轻松上手机器视觉
集成型机器视觉软件几乎可以实时处理这些信息,并将其提供给上一级质量管理系统和工厂控制系统,从而实现高度自动化。由于像 MVTec MERLIC 这样简单易用的图像处理软件无需编程知识,因此各行各业的中小型企业也可以轻松上手,从而推动自身数字化进程的发展。其他2024-05-10 | 中国机器视觉网 |1872 -

高光谱成像的科研应用
高光谱成像通过结合光谱和空间数据,为研究人员和政府当局提供丰富的信息,促进跨学科的各种现象的深入分析、材料识别和监测。高光谱成像是一种快速、准确、可靠的方法,可以以非侵入性、非破坏性的方式分析从小样本到大面积的目标,这使其成为一种出色的研究工具。检测其他2024-05-10 | 中国机器视觉网 |2051 -

半导体制造中的视觉检测技术:紫外相机的关键应用与选择要点
现今的微芯片上包含了几十亿个晶体管,这些晶体管被集成到越来越小的尺寸内。这是通过光刻机来实现的,光刻机使用193–365nm波长的准分子激光器和二极管激光器产生的深紫外线来蚀刻连接晶体管的复杂电路。芯片半导体检测2024-05-09 | 中国机器视觉网 |2804 -
印刷缺陷的视觉检测原理你知道吗?
印刷品作为产品包装的一种主要形式,具有外观精美、清洁卫生、成本低廉、使用方便等优点,在众多行业得到了广泛的应用,其特点是材质多样、工艺复杂、质量要求高。在印刷品中,主要涉及三个主要类型:不干胶标签、烟盒包装和塑料薄膜软包装。检测读码及识别2024-05-08 | 中国机器视觉网 |2464 -

Sherlock8 AI 驱动的视觉检测可以发现极小的纳米级 PCB 缺陷
对于许多公司来说,质量控制是 PCB 制造链中的主要瓶颈,包括可靠性测试和返工有缺陷的 PCB。 提高质量控制的速度和效率可以显着提高产量和成品率,降低制造成本和减少浪费。大多数 PCB 制造商使用自动光学检测 (AOI) 来监控印刷电路板中的缺陷。检测精工和光学2024-05-08 | 中国机器视觉网 |1723 -
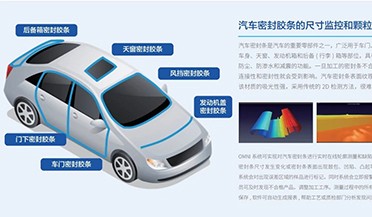
光图智能轮廓测量/缺陷检测系统用实力“说话”
产品轮廓尺寸变化通常表示材料、设备或工序发生了变化,从而导致产品质量低劣、废品率高或回收成本高,造成企业经济损失。进行产品轮廓的尺寸监控对于产品质量管理无疑具有重要作用。在现代工业领域,类似汽车密封胶条、轮胎三角胶、塑料金属型材等产品多由挤出工艺制成,这类产品除了具有材质单一、截面恒定、呈长条形的普遍特征外,大部分呈外轮廓异形,从而进一步增加了检测难度。汽车2024-05-07 | 中国机器视觉网 |1471 -

友思特新品,采集新势力:模块化视频采集与回放系统
友思特新品重磅发布—— proFRAME 模块化图像采集卡系统,是一种用于采集、回放和处理原始视频数据流的模块化解决方案,支持各种常见传输技术,在汽车、医疗和工业等领域有着广泛的应用。汽车2024-05-07 | 中国机器视觉网 |1798