- 分类:
-
全部 镜头 相机 传感器 采集卡 光源 传输及线材 系统产品 智能设备 解决方案 软件算法及深度学习 集成及工业计算机 机器人及机械臂 3D产品 行业综述 其他
展开
- 行业:
-
全部 汽车 芯片半导体 检测 电子组装 精工和光学 铁路 监控 安防 医疗 包装 光伏太阳能 航天航空 军事国防 LCD触摸屏 物流及拆码垛 药品 烟草 纺织 读码及识别 锂电 教学及科普 化学 陶瓷 纸张 木材 玻璃 农业 印刷 食品 造船 勘探 铁和金属 显微镜及生命科学 可回收资源 可再生资源 塑胶塑料 摄影测量和遥感 化妆品 电信 电力 智能交通 三维测量 体育 其他
展开
-

探讨家电代工厂在生产过程中所面临的痛难点
在当今全球制造业的版图中,家电代工厂作为连接品牌商与终端消费者的桥梁,其重要性不言而喻。然而,随着市场需求的日益多样化、个性化以及消费者对产品品质要求的不断提升,家电代工厂在生产过程中也面临一些挑战与痛难点。检测2024-11-01 | 中国机器视觉网 |1728 -

光谱波段上的保障:基于多种光学技术的食品无损检测
提供安全、高质量的食品需要对食品进行检查。过去,人们依靠人类的感官,根据食物的外观、气味和质地来判断食物的质量。工人们站在传送带旁,手动分拣飞驰而过的产品。高速和大批量的准确分拣需要坚定不移的专注、对细节的持续高度关注和耐久性,而人工很容易疲劳、分心和犯错。食品2024-11-01 | 中国机器视觉网 |1713 -
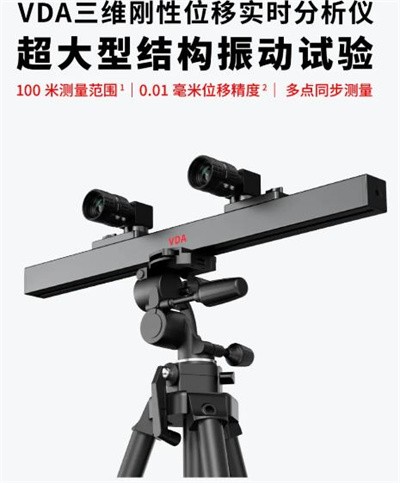
VDA在超大型结构件抗震性能分析中的应用
如本 VDA 测量方案能够有效解决传统的接触式位移传感器存在的问题,其安装简便,具备大范围、高精度、极速标定的特点,能高效快速地测量模型的位移与应变,实现三维全场位移和应变分析,多点三维位移分析,振动、速度、加速度、频率、模态分析等功能。三维测量2024-11-01 | 中国机器视觉网 |1292 -

传感器融合技术如何助力自主移动机器人导航再升级?
进入工业5.0时代,人类将与人工智能(AI)机器人协同工作,机器人辅助而非取代人类。愿景固然美好,但要实现这一目标,AMR必须克服重重挑战,集成各种传感器以及新兴的传感器融合技术将为此提供助益。物流及拆码垛教学及科普2024-10-31 | 中国机器视觉网 |1654 -

康耐视携手Automation NTH解决高挑战的汽车视觉应用
本案例深入剖析了Automation NTH如何帮助一个汽车行业客户提升生产效率并加强缺陷检测能力。介绍其如何借助康耐视的深度学习技术,成功克服一系列汽车行业中的自动化挑战。汽车检测2024-10-31 | 中国机器视觉网 |1673 -
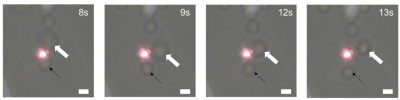
鑫图Dhyana 400DC助力低温光热纳米镊子的研究
依靠激光照射来捕获和操纵纳米颗粒的光镊为生物和生物化学研究提供了重要的工具。然而,光学衍射极限的存在和高激光功率引起的热损伤影响了光镊在生物领域的广泛应用。检测教学及科普2024-10-31 | 中国机器视觉网 |1330 -

ING Robotics 为制造业提供一体化的3D视觉解决
无序抓取是制造业中常见的的自动化任务,机器人从料箱或托盘中取出零件以进行后续加工。该过程需要处理各种尺寸、颜色和材料的物体,因此需要具备机器视觉功能,作为机器人的“眼睛”来实现精确操作。物流及拆码垛2024-10-30 | 中国机器视觉网 |1340 -

HZ系列高精度位移传感器,为点胶机提供可靠的高度反馈
随着工业自动化水平的不断提升,对精密测量和控制的需求也日益增长。点胶机作为工业自动化生产线上的重要设备之一,对Z方向的定位要求极高。HZ系列产品以其高精度、高重复性和非接触式测量的特点,成为了点胶机高度测量系统的理想选择。检测三维测量2024-10-30 | 中国机器视觉网 |1402