- 分类:
-
全部 镜头 相机 传感器 采集卡 光源 传输及线材 系统产品 智能设备 解决方案 软件算法及深度学习 集成及工业计算机 机器人及机械臂 3D产品 行业综述 其他
展开
- 行业:
-
全部 汽车 芯片半导体 检测 电子组装 精工和光学 铁路 监控 安防 医疗 包装 光伏太阳能 航天航空 军事国防 LCD触摸屏 物流及拆码垛 药品 烟草 纺织 读码及识别 锂电 教学及科普 化学 陶瓷 纸张 木材 玻璃 农业 印刷 食品 造船 勘探 铁和金属 显微镜及生命科学 可回收资源 可再生资源 塑胶塑料 摄影测量和遥感 化妆品 电信 电力 智能交通 三维测量 体育 其他
展开
-
迈尔微视S系列:为移动机器人提供可靠避障解决方案
随着移动机器人在仓储物流、医疗健康等领域实现大规模应用,如何确保移动机器人在复杂环境下稳定可靠地实现避障功能,正成为当前面临的重要技术挑战。在实际应用中,避障功能不完善,容易导致碰撞、事故等安全隐患,可靠的避障要求机器人在运动过程中具备精确的环境感知能力和理解能力。其他2024-06-21 | 中国机器视觉网 |1758 -
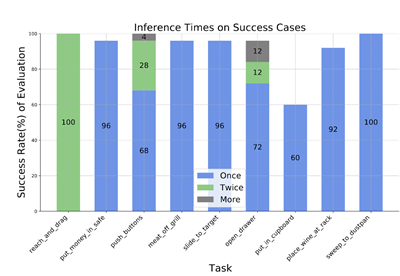
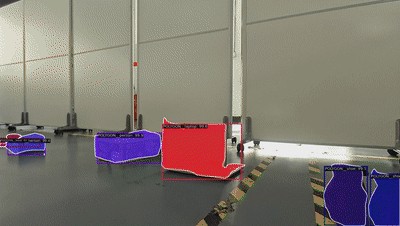
具身智能体三维感知新链条,TeleAI &上海AI Lab提出多视角融合具身模型「SAM-E」
想让机器人在现实生活中学会执行复杂任务,首先需要使机器人理解操作对象和被操作对象的属性,以及相应的三维操作空间,包括物体位置、形状、物体之间的遮挡关系,以及对象与环境的关系等。三维测量2024-06-21 | 中国机器视觉网 |4314 -
Euresys S2I 基于FPGA的RoCE v2 25G GigE Vision IP核
GigE Vision是一种基于以太网的图像传输标准,可实现1Gbps到10Gbps的传输带宽,也可向25/50G/100Gbps甚至更高速度升级扩展;GigE Vision相机可以直接通过标准网卡和PC实现连接,网卡选择多样,价格低廉;另外,GigE Vision 可通过各种方式实现多相机拓展,系统升级非常方便。汽车监控医疗2024-06-21 | 中国机器视觉网 |3437 -
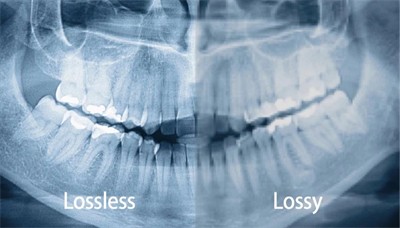
Pleora璞加科技论压缩和机器视觉
在当今不断发展的技术世界中,压缩到底有多重要?压缩到底是什么?是无损压缩还是有损压缩?在我们探讨压缩如何在机器视觉中发挥其重要作用之前,让我们首先研究一下无损压缩和有损压缩的一般需求。其他2024-06-20 | 中国机器视觉网 |1570 -
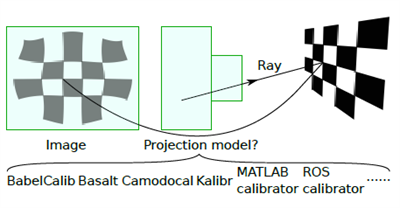
相机标定工具的综述与比较研究
在许多基于相机的应用中,需要通过几何相机标定(GCC)来确定入射光线与图像像素之间的几何关系(投影模型)。本研究旨在提供实用的标定指南,对现有的GCC工具进行了调查和评估。调查涵盖了相机模型、标定目标和这些工具中使用的算法,突出了它们的特性以及GCC开发的趋势。评估比较了六个基于目标的GCC工具,即BabelCalib、Basalt、Camodocal、Kalibr、MATLAB标定器和基于OpenCV的ROS标定器,使用模拟和真实数据对具有三种传统投影模型的广角和鱼眼镜头相机进行了测试。这些测试揭示了这些相机模型的优缺点以及这些GCC工具的可重复性。在调查和评估结果基础上,还讨论了未来GCC研究方向精工和光学2024-06-20 | 中国机器视觉网 |2875 -
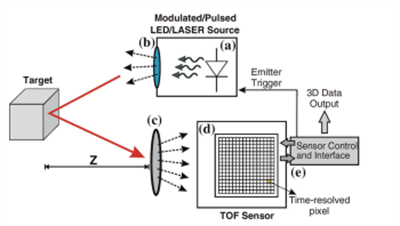
一文了解3D视觉成像原理
3D视觉成像是工业机器人信息感知的一种最重要的方法,可分为光学和非光学成像方法。目前应用最多的还是光学方法,包括:飞行时间法、结构光法、激光扫描法、莫尔条纹法、激光散斑法、干涉法、照相测量法、激光跟踪法、从运动获得形状、从阴影获得形状,以及其他的ShapefromX等。本次介绍几种典型方案。精工和光学2024-06-20 | 中国机器视觉网 |1948 -

AI小模型与智能运营平台的应用与收益分析
AI在制造业的生产过程自动化中发挥着重要作用,包括智能工厂、预测性维护、质量检测等,这将极大地提高制造业的生产效率和质量,降低成本,实现可持续发展。其他2024-06-20 | 中国机器视觉网 |1753 -
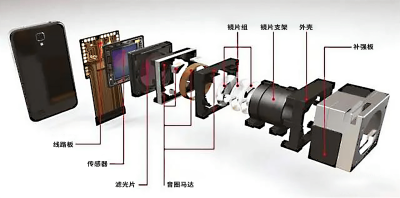
基于光谱共焦技术的相机模组胶水检测
随着终端消费者对手机拍摄功能愈加关注,智能手机的拍摄能力逐渐成为手机的主要卖点和消费者的换机推动力。各大手机厂商致力于为用户打造极致的摄影体验,通过增加摄像头数量等方式来提升拍摄质量,各种摄像头模组创新方案纷纷涌现。检测电子组装2024-06-20 | 中国机器视觉网 |1588