日期
- 01/18
- 2022
咨询
-
QQ扫一扫

-
Vision小助手
(CMVU)
大恒图像 | 3D视觉引导机器人上下料
收藏
2022-01-18 09:52:20来源: 中国大恒(集团)有限公司北京图像视觉技术分公司
随着工业自动化的崛起,机器视觉扮演着越来越重要的角色,传统的2D定位无法获取物体的空间坐标信息,伴随3D传感器和机器人抓取集成解决方案的出现,新的市场正在开拓。在交通行业,高速铁路是满足国民出行需求、加强国防建设的重要交通枢纽,弹条作为轨道结构的关键一环也在稳步发展中,其重要性也越来越被行业所关注。3D视觉引导与机器人相结合可以实现上下料的自动化操作,缩短备料时间,提高生产率,减少人机交互的需要。
方案难点
高铁系统铁轨弹条生产环节的上下料自动化,要求对复杂形状的弹条堆料进行抓取搬运,实现从料筐、料带到料架的无缝衔接。难点有以下几点:
1) 弹条形状复杂
2) 被测物堆叠情况复杂
3) 上下料流程<5s
4) 视觉定位时间<2s
5) 有效抓取率>99%

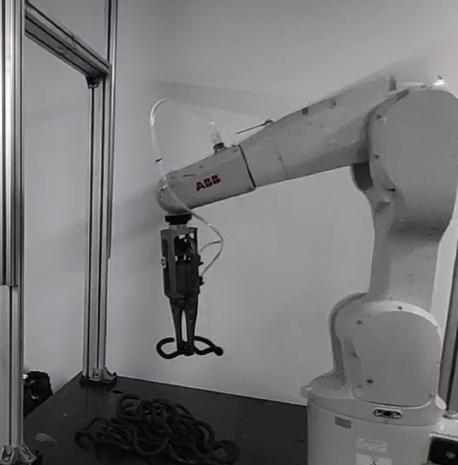
被测物:弹条
方案概述
系统组成
硬件选型:PhoXi 系列3D传感器
传感器支持千兆以太网数据传输,无需相对运动即可获取物体的3D信息,保证数据快速稳定的获取。
软件选型:HALCON
HALCON是德国MVTec公司开发的一套完善的标准机器视觉算法包,拥有应用广泛的机器视觉集成开发环境,HALCON算法库运算速度快,鲁棒性好,算子丰富,可以实现稳定准确的定位功能,并且为后续功能扩展提供了极大的方便。
方案优势
1) 结构光成像,精度高,成像速度快,抗干扰性强;
2) 支持零件的位姿识别;
3) 支持混杂零部件定位,能够实现零件分拣。
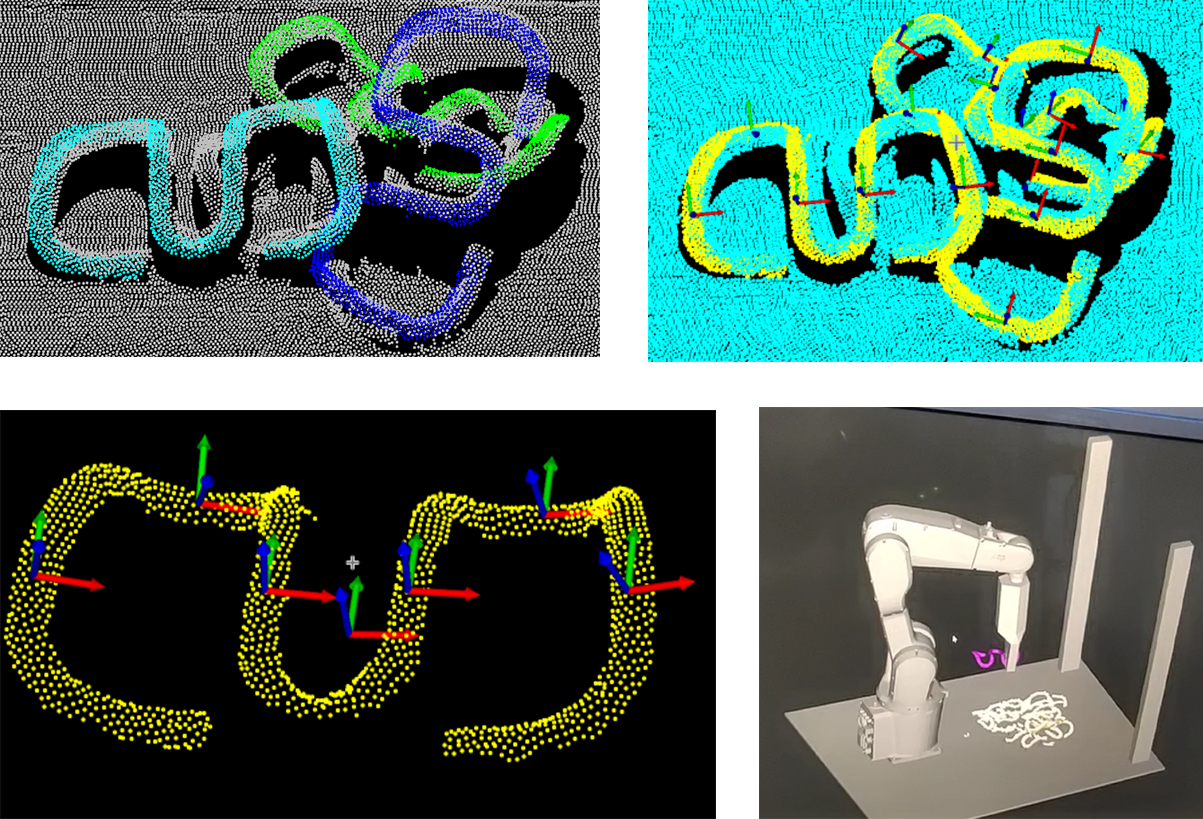
方案展示
测试系统满足应用需求,并且支持后续扩展开发。
相关推荐
 |  |
客户定制服务
如果您也有类似的需求却无从开展,大恒图像可以提供一对一的定制化服务,我们的工程师可以为您在架设、开发、部署等多个关键节点提供解决方案,帮助您解决问题。