首页>论文
- 类别:
-
全部 专家综述 技术前沿 专业论文
展开
- 标签:
-
全部 机器视觉 图像处理 机器人 人工智能 模式识别 其他
展开
-
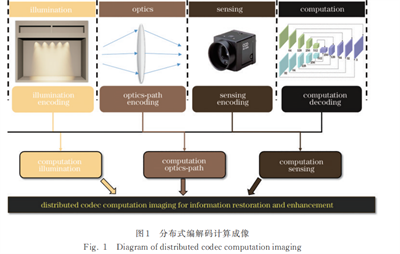
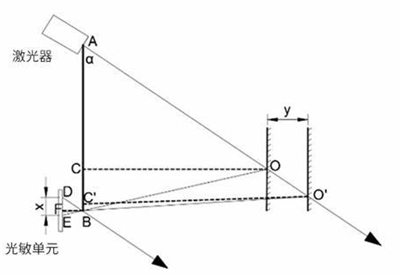
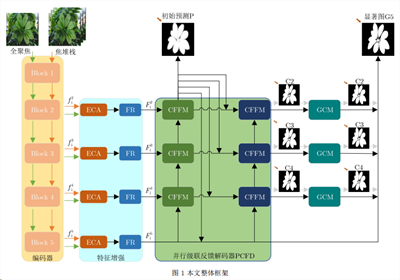
计算成像技术在信息复原及增强中的研究进展
专业论文 2024-07-23 | 机器视觉 | 图像处理 |1602 -
基于科惠力3D相机的汽车电池包涂胶质量问题解决方案
专家综述 2024-07-23 | 机器视觉 |1575 -
方诚第三代工业相机IV系列多功能口的应用
专家综述 2024-07-16 | 机器视觉 |1469 -
基于集成成像的悬浮光场3D显示系统
专业论文 2024-06-27 | 机器视觉 | 图像处理 |1593 -
基于上下文感知跨层特征融合的光场图像显著性检测
专业论文 2024-06-20 | 机器视觉 | 图像处理 |1594 -
面向现代视觉系统的低功耗图像传感器
专家综述 2024-06-03 | 机器视觉 | 图像处理 | 模式识别 |2076