- 分类:
-
全部 镜头 相机 传感器 采集卡 光源 传输及线材 系统产品 智能设备 解决方案 软件算法及深度学习 集成及工业计算机 机器人及机械臂 3D产品 行业综述 其他
展开
- 行业:
-
全部 汽车 芯片半导体 检测 电子组装 精工和光学 铁路 监控 安防 医疗 包装 光伏太阳能 航天航空 军事国防 LCD触摸屏 物流及拆码垛 药品 烟草 纺织 读码及识别 锂电 教学及科普 化学 陶瓷 纸张 木材 玻璃 农业 印刷 食品 造船 勘探 铁和金属 显微镜及生命科学 可回收资源 可再生资源 塑胶塑料 摄影测量和遥感 化妆品 电信 电力 智能交通 三维测量 体育 其他
展开
-

电子行业视觉续码,拆垛,混码全流程自动化介绍
如何高效快捷地解决成品生产后的物料周转,是不少加工制造企业面临的一大问题。本案例中,电子行业某头部企业引入星猿哲拆码垛机器人,助力其完成成品纸箱入库、出库的自动搬运工作,相较人工降本增效的同时,亦通过领先的算法科技完成续码、标签朝外码放、智能混码等复杂功能,实现半自动工厂到全自动工厂的成功转型升级。物流及拆码垛2022-05-09 | 中国机器视觉网 |3175 -

梅卡曼德移动充电解决方案,AI+3D助力“双碳”目标建设发展
近年来,新能源汽车产业快速发展。迅速增长的新能源汽车销量使充电设施的需求量迅速增加。传统的充电桩建设难度大、成本高、周期长,并存在充电桩固定式安装导致的利用率不高,人工插拔灵活度低等问题。汽车2022-05-09 | 中国机器视觉网 |2242 -

视科普技术分析:视觉引导机器人智能抓取
视科普为如下不同类别的料框抓取提供了解决方案:堆叠零件;分层零件;散乱零件。SCAPE系统可以应对以上所有场景。其他“料框抓取”只针对其中的某些特定场景(堆叠,分层或类似半结构化的情况)进行了开发。但是这些系统的使用限制极大,因为相当多的料框抓取任务在开始时零件处于规则的堆叠或分层状态,但是随着任务进行,最终仍会变成完全随机的状态。出现这种情况是因为在料框抓取过程中可能会推挤运动路径中的其他零件,导致原有的零件秩序被打乱。电子组装其他2022-03-10 | 中国机器视觉网 |2749 -

全场景落地应用:星猿哲 (XYZ Robotics) 拆码垛案例集锦
星猿哲科技凭借全球前沿的3D视觉、机器人运动规划、智能垛型规划等技术,持续深耕物流拆码垛的整站交付业务。依托对应用场景的深厚理解以及末端夹具设计的经验积累,星猿哲已实现纸箱、(无缝隙)料箱、麻袋、圆桶等多类型SKU抓取,覆盖单拆、排拆、层拆、混码等多种业务场景,应用案例广泛分布于物流、医药、电子、日化、化工等多个行业。物流及拆码垛2022-03-08 | 中国机器视觉网 |2852 -
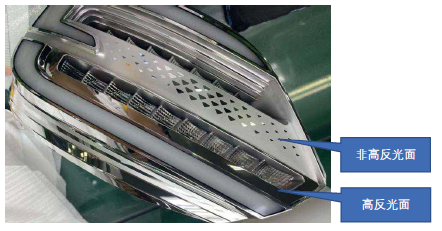
开异智能汽车车灯零件表面缺陷检测案例
部分汽车车灯零件涉及到一种工艺——真空镀铝。而零件本体自身的材质为塑料,经过真空镀铝后,表面会形成一层有镜面效果的膜。正是因为工艺的一些特点,导致产品无法做到100%的镀铝合格性,而且人工检测的主观性依赖较强,于是自动化表面缺陷检测代替人工检测的需求被提出。汽车检测2022-01-11 | 中国机器视觉网 |2558 -

海康机器人携手裕同科技,开启包装行业的智造之旅
说到包装盒质量,手机、电脑等高端电子产品的外包装当仁不让!今天,我们一起走进国内领先的高端品牌包装整体解决方案提供商——裕同科技,在河南许昌的智能制造产业园里,从原料入库到成品发运,那些精美的包装盒,又经历了哪些“科技人生”呢?包装2022-01-05 | 中国机器视觉网 |2180 -
大众变速器携手海康机器人,为智慧物流全线加速
为提高厂内物流智能化水平,大众汽车自动变速器(大连)有限公司(简称“大众变速器”)找到海康机器人,在成品下线和壳体上线环节,全面引入基于移动机器人AMR的智慧物流方案。机器人及机械臂2021-07-26 | 中国机器视觉网 |2878 -
紧凑型移动机器人优化工艺链
自主移动机器人有很多应用。它们适合用于装载许多产品并准备发货的物流和运输领域。装载和卸载是移动机器人的核心业务。机器人及机械臂2021-07-15 | 中国机器视觉网 |3815